= > me that the indices can take the values 1,2,3 and answer the following. ‘ (a) oe Fad the components of an objective Srd order tensor, given by ¢ = hit nder the coordinate change Qi = (€¢5) ¥ (& 19 the "new" basis vec ; or (2) How many unique elements are in a tensor whose components are denoted by Cunt? © (2) Suppose that the following 2 assertions are given: i * Ty = CyuBy A wr ai Ww O° od Tj = bo for some continuously differentiable scalar function U(B)- 7 ‘ N Without assuming anything else, can something be said about he structure of Ou \ How many unique elements can Ciji possess if both the above assertions ar true (d) (2) Suppose that the following 4 assertions are given: ® Tj = CyuBu oT; = ho for some continuously differentiable scalar function U (B). o T;=T; * By = Bji How many unique elements can Cijit possess? (€) Consider a square plate initially occupying the space defined by = {(X1, Xz Xs)|X1 € [=a,a), Xz € [~a,al, Xs € [~t,]}. Suppose that functions u(X), v(X), and w(X) 87 defined such that the deformed positions of a point initially at Xi; are given by 71 =X1 rum Xe — Xo z= Xz rox - Xige z3=X3+w. Assume that the functions u,v,w don’t have any dependence on X3. Answer the Following i, (2) Express the components of the deformation gradient as a matriz. i (2) For the infinitesimal case, write down the strains in "Voigt" notation as 0 J En Ep E33) s Ep’ Es Ens, ii 2) In the deformed configuration, what is the total length of the edge that was initially going from (X1, Xa, Xs) = (a,—a,1) to (X31, X2,X3) = (a,0,t) ? (Hint_: Don't try to over-simplify the expressions) (B® In the deformed configuration, what is the angle at the corner initially positioned dt (X1,X2,X3) = (—a, —a,0) ? i [4% What is the relative volume change of an infinitesimal volume element initially at (X1,X2,X3)? % Za Suppose that u="v =0 in Q. Provide a mathematical statement of the principle » of volume conservation. BN
Question:
 =
> me that the indices can take the values 1,2,3 and answer the following.
‘
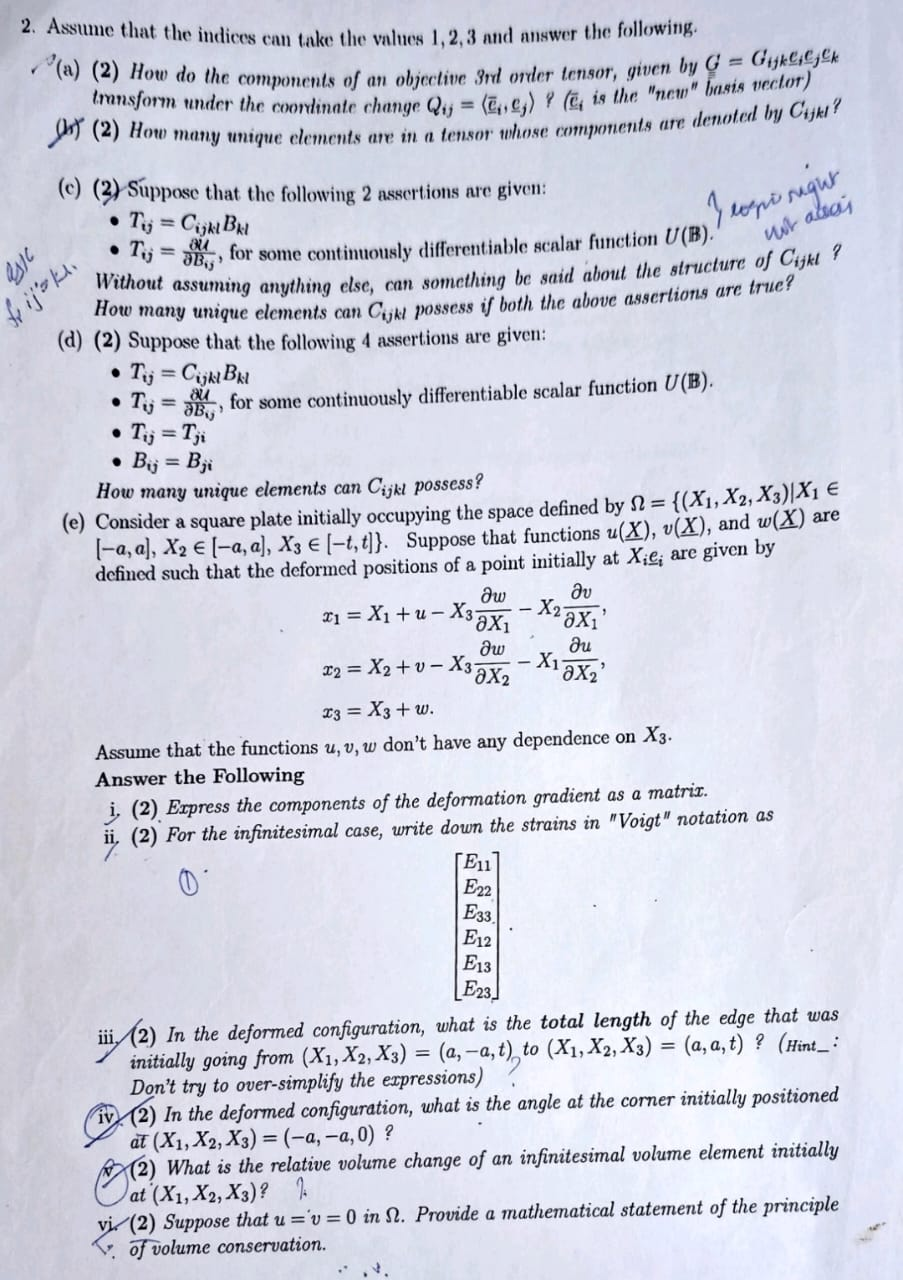
(a) oe Fad the components of an objective Srd order tensor, given by ¢ = hit
nder the coordinate change Qi = (€¢5) ¥ (& 19 the "new" basis vec ;
or (2) How many unique elements are in a tensor whose components are denoted by Cunt?
© (2) Suppose that the following 2 assertions are given: i
* Ty = CyuBy A wr ai
Ww O° od Tj = bo for some continuously differentiable scalar function U(B)- 7 ‘
N Without assuming anything else, can something be said about he structure of Ou
\ How many unique elements can Ciji possess if both the above assertions ar true
(d) (2) Suppose that the following 4 assertions are given:
® Tj = CyuBu
oT; = ho for some continuously differentiable scalar function U (B).
o T;=T;
* By = Bji
How many unique elements can Cijit possess?
(€) Consider a square plate initially occupying the space defined by = {(X1, Xz Xs)|X1 €
[=a,a), Xz € [~a,al, Xs € [~t,]}. Suppose that functions u(X), v(X), and w(X) 87
defined such that the deformed positions of a point initially at Xi; are given by
71 =X1 rum Xe — Xo
z= Xz rox - Xige
z3=X3+w.
Assume that the functions u,v,w don’t have any dependence on X3.
Answer the Following
i, (2) Express the components of the deformation gradient as a matriz.
i (2) For the infinitesimal case, write down the strains in "Voigt" notation as
0 J En
Ep
E33) s
Ep’
Es
Ens,
ii 2) In the deformed configuration, what is the total length of the edge that was
initially going from (X1, Xa, Xs) = (a,—a,1) to (X31, X2,X3) = (a,0,t) ? (Hint_:
Don't try to over-simplify the expressions)
(B® In the deformed configuration, what is the angle at the corner initially positioned
dt (X1,X2,X3) = (—a, —a,0) ? i
[4% What is the relative volume change of an infinitesimal volume element initially
at (X1,X2,X3)? %
Za Suppose that u="v =0 in Q. Provide a mathematical statement of the principle
» of volume conservation.
BN
=
> me that the indices can take the values 1,2,3 and answer the following.
‘
(a) oe Fad the components of an objective Srd order tensor, given by ¢ = hit
nder the coordinate change Qi = (€¢5) ¥ (& 19 the "new" basis vec ;
or (2) How many unique elements are in a tensor whose components are denoted by Cunt?
© (2) Suppose that the following 2 assertions are given: i
* Ty = CyuBy A wr ai
Ww O° od Tj = bo for some continuously differentiable scalar function U(B)- 7 ‘
N Without assuming anything else, can something be said about he structure of Ou
\ How many unique elements can Ciji possess if both the above assertions ar true
(d) (2) Suppose that the following 4 assertions are given:
® Tj = CyuBu
oT; = ho for some continuously differentiable scalar function U (B).
o T;=T;
* By = Bji
How many unique elements can Cijit possess?
(€) Consider a square plate initially occupying the space defined by = {(X1, Xz Xs)|X1 €
[=a,a), Xz € [~a,al, Xs € [~t,]}. Suppose that functions u(X), v(X), and w(X) 87
defined such that the deformed positions of a point initially at Xi; are given by
71 =X1 rum Xe — Xo
z= Xz rox - Xige
z3=X3+w.
Assume that the functions u,v,w don’t have any dependence on X3.
Answer the Following
i, (2) Express the components of the deformation gradient as a matriz.
i (2) For the infinitesimal case, write down the strains in "Voigt" notation as
0 J En
Ep
E33) s
Ep’
Es
Ens,
ii 2) In the deformed configuration, what is the total length of the edge that was
initially going from (X1, Xa, Xs) = (a,—a,1) to (X31, X2,X3) = (a,0,t) ? (Hint_:
Don't try to over-simplify the expressions)
(B® In the deformed configuration, what is the angle at the corner initially positioned
dt (X1,X2,X3) = (—a, —a,0) ? i
[4% What is the relative volume change of an infinitesimal volume element initially
at (X1,X2,X3)? %
Za Suppose that u="v =0 in Q. Provide a mathematical statement of the principle
» of volume conservation.
BN
Asked by: Adapaka Jagadeesh
Created at: 2025-09-01 13:48:03
Final Answer:
Question:
Let's address each part of the problem step by step. ### (a) Transformation of an objective 3rd order tensor An objective tensor transforms under a coordinate change (rotation) \( Q_{ij} = (\boldsymbol{\epsilon}_i \cdot \boldsymbol{\epsilon}_j') \) (where \( \boldsymbol{\epsilon}_i' \) is the new basis) as: \[ G_{ijk}' = Q_{ip} Q_{jq} Q_{kr} G_{pqr} \] This is because each index of the tensor must transform with the rotation matrix \( Q \). **Answer:** \[ \boxed{G_{ijk}' = Q_{ip} Q_{jq} Q_{kr} G_{pqr}} \] ### (b) Number of unique elements in \( C_{ijkl} \) The tensor \( C_{ijkl} \) has 4 indices, each running from 1 to 3. Without any symmetries, the total number of components is \( 3^4 = 81 \). However, if no symmetries are assumed, all 81 are unique. But typically in elasticity, symmetries exist. However, the question does not assume any symmetries, so all 81 are unique. **Answer:** \[ \boxed{81} \] ### (c) Structure of \( C_{ijkl} \) given \( T_{ij} = C_{ijkl} B_{kl} \) and \( T_{ij} = \frac{\partial U}{\partial B_{ij}} \) Given: 1. \( T_{ij} = C_{ijkl} B_{kl} \) 2. \( T_{ij} = \frac{\partial U}{\partial B_{ij}} \) Then: \[ \frac{\partial U}{\partial B_{ij}} = C_{ijkl} B_{kl} \] Differentiating again: \[ \frac{\partial^2 U}{\partial B_{ij} \partial B_{mn}} = C_{ijkl} \frac{\partial B_{kl}}{\partial B_{mn}} = C_{ijkl} \delta_{km} \delta_{ln} = C_{ijmn} \] Since \( U \) is continuously differentiable, the order of differentiation can be interchanged: \[ \frac{\partial^2 U}{\partial B_{ij} \partial B_{mn}} = \frac{\partial^2 U}{\partial B_{mn} \partial B_{ij}} \implies C_{ijmn} = C_{mnij} \] So \( C_{ijkl} \) has major symmetry: \( C_{ijkl} = C_{klij} \). Now, without any other symmetries (like \( T_{ij} = T_{ji} \) or \( B_{ij} = B_{ji} \)), we only have this major symmetry. The number of unique elements can be found by considering the symmetry \( C_{ijkl} = C_{klij} \). This reduces the number from 81 to 45 (which is the number for a symmetric 6x6 matrix, since the tensor can be mapped to a 6x6 matrix using Voigt notation). **Answer:** - Structure: \( C_{ijkl} = C_{klij} \) (major symmetry). - Number of unique elements: \( \boxed{45} \) ### (d) Additional symmetries: \( T_{ij} = T_{ji} \) and \( B_{ij} = B_{ji} \) Now we have: 1. \( T_{ij} = C_{ijkl} B_{kl} \) 2. \( T_{ij} = \frac{\partial U}{\partial B_{ij}} \) 3. \( T_{ij} = T_{ji} \) 4. \( B_{ij} = B_{ji} \) From (c), we already have \( C_{ijkl} = C_{klij} \). From \( T_{ij} = T_{ji} \): \[ C_{ijkl} B_{kl} = C_{jikl} B_{kl} \implies C_{ijkl} = C_{jikl} \quad \text{(since \( B_{kl} \) is arbitrary symmetric)} \] Similarly, from \( B_{ij} = B_{ji} \), we can also argue that \( C_{ijkl} = C_{ijlk} \) (because the tensor \( C \) acts on symmetric \( B \), so only the symmetric part matters, but typically we impose \( C_{ijkl} = C_{ijlk} \) for consistency). So we have: - Minor symmetries: \( C_{ijkl} = C_{jikl} = C_{ijlk} \) - Major symmetry: \( C_{ijkl} = C_{klij} \) With these symmetries, the number of unique elements is that of a symmetric 6x6 matrix, which has 21 independent components. **Answer:** Number of unique elements: \( \boxed{21} \) ### (e) Deformation of a square plate Given: \[ x_1 = X_1 + u - X_3 \frac{\partial w}{\partial X_1} - X_2 \frac{\partial v}{\partial X_1} \] \[ x_2 = X_2 + v - X_3 \frac{\partial w}{\partial X_2} - X_1 \frac{\partial u}{\partial X_2} \] \[ x_3 = X_3 + w \] with \( u, v, w \) independent of \( X_3 \). #### (i) Deformation gradient \( F_{ij} = \frac{\partial x_i}{\partial X_j} \) Compute each component: \[ F_{11} = \frac{\partial x_1}{\partial X_1} = 1 + \frac{\partial u}{\partial X_1} - X_3 \frac{\partial^2 w}{\partial X_1^2} - X_2 \frac{\partial^2 v}{\partial X_1^2} \] \[ F_{12} = \frac{\partial x_1}{\partial X_2} = -X_3 \frac{\partial^2 w}{\partial X_1 \partial X_2} - \frac{\partial v}{\partial X_1} - X_2 \frac{\partial^2 v}{\partial X_1 \partial X_2} \] \[ F_{13} = \frac{\partial x_1}{\partial X_3} = -\frac{\partial w}{\partial X_1} \] \[ F_{21} = \frac{\partial x_2}{\partial X_1} = -X_3 \frac{\partial^2 w}{\partial X_1 \partial X_2} - \frac{\partial u}{\partial X_2} - X_1 \frac{\partial^2 u}{\partial X_1 \partial X_2} \] \[ F_{22} = \frac{\partial x_2}{\partial X_2} = 1 + \frac{\partial v}{\partial X_2} - X_3 \frac{\partial^2 w}{\partial X_2^2} - X_1 \frac{\partial^2 u}{\partial X_2^2} \] \[ F_{23} = \frac{\partial x_2}{\partial X_3} = -\frac{\partial w}{\partial X_2} \] \[ F_{31} = \frac{\partial x_3}{\partial X_1} = \frac{\partial w}{\partial X_1} \] \[ F_{32} = \frac{\partial x_3}{\partial X_2} = \frac{\partial w}{\partial X_2} \] \[ F_{33} = \frac{\partial x_3}{\partial X_3} = 1 \] So the matrix is: \[ \mathbf{F} = \begin{bmatrix} 1 + u_{,1} - X_3 w_{,11} - X_2 v_{,11} & -X_3 w_{,12} - v_{,1} - X_2 v_{,12} & -w_{,1} \\ -X_3 w_{,12} - u_{,2} - X_1 u_{,12} & 1 + v_{,2} - X_3 w_{,22} - X_1 u_{,22} & -w_{,2} \\ w_{,1} & w_{,2} & 1 \end{bmatrix} \] where \( u_{,1} = \frac{\partial u}{\partial X_1} \), etc. #### (ii) Infinitesimal strains in Voigt notation For infinitesimal strain, \( \mathbf{E} \approx \frac{1}{2} (\mathbf{F} + \mathbf{F}^T) - \mathbf{I} \). So: \[ E_{11} = \frac{\partial u}{\partial X_1} - X_3 \frac{\partial^2 w}{\partial X_1^2} - X_2 \frac{\partial^2 v}{\partial X_1^2} \] \[ E_{22} = \frac{\partial v}{\partial X_2} - X_3 \frac{\partial^2 w}{\partial X_2^2} - X_1 \frac{\partial^2 u}{\partial X_2^2} \] \[ E_{33} = 0 \quad \text{(since } \frac{\partial w}{\partial X_3}=0 \text{ and no other terms)} \] \[ E_{12} = \frac{1}{2} \left( \frac{\partial u}{\partial X_2} + \frac{\partial v}{\partial X_1} - 2X_3 \frac{\partial^2 w}{\partial X_1 \partial X_2} - X_2 \frac{\partial^2 v}{\partial X_1 \partial X_2} - X_1 \frac{\partial^2 u}{\partial X_1 \partial X_2} \right) \] \[ E_{13} = \frac{1}{2} \left( \frac{\partial w}{\partial X_1} - \frac{\partial w}{\partial X_1} \right) = 0 \] \[ E_{23} = \frac{1}{2} \left( \frac{\partial w}{\partial X_2} - \frac{\partial w}{\partial X_2} \right) = 0 \] So in Voigt notation: \[ \begin{bmatrix} E_{11} \\ E_{22} \\ E_{33} \\ E_{12} \\ E_{13} \\ E_{23} \end{bmatrix} = \begin{bmatrix} u_{,1} - X_3 w_{,11} - X_2 v_{,11} \\ v_{,2} - X_3 w_{,22} - X_1 u_{,22} \\ 0 \\ \frac{1}{2} (u_{,2} + v_{,1} - 2X_3 w_{,12} - X_2 v_{,12} - X_1 u_{,12}) \\ 0 \\ 0 \end{bmatrix} \] #### (iii) Length of edge from \( (a, -a, t) \) to \( (a, a, t) \) Initially, this edge is along \( X_2 \) direction at \( X_1 = a, X_3 = t \), with \( X_2 \) from \(-a\) to \(a\). The deformed position is given by: \[ x_1 = a + u - t \frac{\partial w}{\partial X_1} - X_2 \frac{\partial v}{\partial X_1} \] \[ x_2 = X_2 + v - t \frac{\partial w}{\partial X_2} - a \frac{\partial u}{\partial X_2} \] \[ x_3 = t + w \] So the vector along the edge is: \[ d\mathbf{x} = \frac{\partial \mathbf{x}}{\partial X_2} dX_2 \] So the length element: \[ ds = \left| \frac{\partial \mathbf{x}}{\partial X_2} \right| dX_2 \] Then the total length: \[ L = \int_{-a}^{a} \left| \frac{\partial \mathbf{x}}{\partial X_2} \right| dX_2 \] But since the hint says not to over-simplify, we can leave it as is. **Answer:** \[ \boxed{L = \int_{-a}^{a} \sqrt{ \left( \frac{\partial x_1}{\partial X_2} \right)^2 + \left( \frac{\partial x_2}{\partial X_2} \right)^2 + \left( \frac{\partial x_3}{\partial X_2} \right)^2 } dX_2} \] where the derivatives are evaluated at \( X_1 = a, X_3 = t \). #### (iv) Angle at corner \( (-a, -a, 0) \) Initially, the edges are along \( X_1 \) and \( X_2 \). The deformed vectors are: \[ \mathbf{v}_1 = \frac{\partial \mathbf{x}}{\partial X_1} \quad \text{(along \( X_1 \) direction)} \] \[ \mathbf{v}_2 = \frac{\partial \mathbf{x}}{\partial X_2} \quad \text{(along \( X_2 \) direction)} \] Then the angle \( \theta \) is: \[ \cos \theta = \frac{ \mathbf{v}_1 \cdot \mathbf{v}_2 }{ |\mathbf{v}_1| |\mathbf{v}_2| } \] evaluated at \( (-a, -a, 0) \). #### (v) Relative volume change The volume change is given by \( J = \det \mathbf{F} \). So relative volume change is \( J - 1 \). #### (vi) Volume conservation when \( u = v = 0 \) If \( u = v = 0 \), then: \[ x_1 = X_1 - X_3 \frac{\partial w}{\partial X_1} \] \[ x_2 = X_2 - X_3 \frac{\partial w}{\partial X_2} \] \[ x_3 = X_3 + w \] Volume conservation requires \( J = 1 \) everywhere. Compute \( \mathbf{F} \): \[ \mathbf{F} = \begin{bmatrix} 1 - X_3 w_{,11} & -X_3 w_{,12} & -w_{,1} \\ -X_3 w_{,12} & 1 - X_3 w_{,22} & -w_{,2} \\ w_{,1} & w_{,2} & 1 \end{bmatrix} \] Then \( J = \det \mathbf{F} \). Setting \( J = 1 \) gives a condition on \( w \). **Mathematical statement:** \[ \det \begin{bmatrix} 1 - X_3 \frac{\partial^2 w}{\partial X_1^2} & -X_3 \frac{\partial^2 w}{\partial X_1 \partial X_2} & -\frac{\partial w}{\partial X_1} \\ -X_3 \frac{\partial^2 w}{\partial X_1 \partial X_2} & 1 - X_3 \frac{\partial^2 w}{\partial X_2^2} & -\frac{\partial w}{\partial X_2} \\ \frac{\partial w}{\partial X_1} & \frac{\partial w}{\partial X_2} & 1 \end{bmatrix} = 1 \] for all \( X_1, X_2, X_3 \). This is the condition for volume conservation. ### Summary of Answers: (a) \( \boxed{G_{ijk}' = Q_{ip} Q_{jq} Q_{kr} G_{pqr}} \) (b) \( \boxed{81} \) (c) Structure: \( C_{ijkl} = C_{klij} \), unique elements: \( \boxed{45} \) (d) \( \boxed{21} \) (e) (i) \( \mathbf{F} = \begin{bmatrix} 1 + u_{,1} - X_3 w_{,11} - X_2 v_{,11} & -X_3 w_{,12} - v_{,1} - X_2 v_{,12} & -w_{,1} \\ -X_3 w_{,12} - u_{,2} - X_1 u_{,12} & 1 + v_{,2} - X_3 w_{,22} - X_1 u_{,22} & -w_{,2} \\ w_{,1} & w_{,2} & 1 \end{bmatrix} \) (ii) \( \begin{bmatrix} E_{11} \\ E_{22} \\ E_{33} \\ E_{12} \\ E_{13} \\ E_{23} \end{bmatrix} = \begin{bmatrix} u_{,1} - X_3 w_{,11} - X_2 v_{,11} \\ v_{,2} - X_3 w_{,22} - X_1 u_{,22} \\ 0 \\ \frac{1}{2} (u_{,2} + v_{,1} - 2X_3 w_{,12} - X_2 v_{,12} - X_1 u_{,12}) \\ 0 \\ 0 \end{bmatrix} \) (iii) \( \boxed{L = \int_{-a}^{a} \sqrt{ \left( \frac{\partial x_1}{\partial X_2} \right)^2 + \left( \frac{\partial x_2}{\partial X_2} \right)^2 + \left( \frac{\partial x_3}{\partial X_2} \right)^2 } dX_2} \) evaluated at \( X_1=a, X_3=t \) (iv) Angle \( \theta \) with \( \cos \theta = \frac{ \mathbf{v}_1 \cdot \mathbf{v}_2 }{ |\mathbf{v}_1| |\mathbf{v}_2| } \) at \( (-a,-a,0) \) (v) Relative volume change: \( \boxed{J - 1} \) where \( J = \det \mathbf{F} \) (vi) Volume conservation: \( \boxed{\det \mathbf{F} = 1} \) for all \( \mathbf{X} \)
Asked by: Adapaka Jagadeesh
Created at: 2025-09-01 13:56:19
Final Answer:
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :