1: Introduction: Provide the complete necessary conceptual background concepts with clear explanation and the introduction required to understand and answer the given question. Add an Explanation block at the end of the introduction by adding various relevant supporting statements and explaining the introduction concisely. Note: Do not use personal pronouns like I, we, you, etc. The response must look as if it is written by a human. Explanation: Articulate the importance of the introduction, providing more relevant comprehensive supporting statements that link these concepts directly to the question. This explanation should clarify how the introduction aids in comprehending the subsequent steps. 2: Presentation of Relevant Formulas Required To Solve & Representing The Given Data For The Given Data: List and also describe all formulas required to solve the question. Ensure each formula is presented clearly and is directly applicable to the problem. Explanation: Detail the derivation or rationale behind each formula, explaining its relevance and necessity in the context of the problem-solving process. Use more relavent comprehensive supporting statements to reinforce the significance of these mathematical tools. 3: A Detailed Step-by-Step Solution: Please provide a structured step-by-step solution to the given question, by incorporating any relevant data provided. This should include all necessary mathematical calculations presented in a logical and clear manner. The solution must be comprehensive, addressing all aspects of the question without omission. Explanation: For each step in the solution, provide a thorough explanation of the calculations performed, including how each step contributes to solving the overall problem. Add more relevant comprehensive Supporting statements should enhance understanding and connect each calculation back to the core question. Conclusion: Conclude with a concise summary of the solution, succinctly presenting the final answer derived from the calculations.The robot shown has five degrees of rotational freedom. The x-y-z axes are attached to the base ring, which rotates about the z-axis at the rate w1. The arm O1-O rotates about the x-axis at the rate w = 6. The control arm OA rotates about axis 01-07 at the rate w3 and about a perpendicular axis through Op which is momentarily parallel to the x-axis at the rate wy4 = p. Finally, the jaws rotate about axis O»-A at the rate ws. The magnitudes of all angular rates are constant. Determine the angular velocity w and angular acceleration a of the jaws A if = 58° and 8 = 37°, both constant, and if wq = 3.3 rad/s, wy = w3 = w4 = 0,and ws = 1.4 rad/s, all constant. 2 ag Ng $ ls froC(Ea acl (6 1 Va yy d | i | | | |
Question:
1: Introduction:
Provide the complete necessary conceptual background concepts with clear explanation and the introduction required to understand and answer the given question. Add an Explanation block at the end of the introduction by adding various relevant supporting statements and explaining the introduction concisely.
Note: Do not use personal pronouns like I, we, you, etc. The response must look as if it is written by a human.
Explanation: Articulate the importance of the introduction, providing more relevant comprehensive supporting statements that link these concepts directly to the question. This explanation should clarify how the introduction aids in comprehending the subsequent steps.
2: Presentation of Relevant Formulas Required To Solve & Representing The Given Data For The Given Data:
List and also describe all formulas required to solve the question. Ensure each formula is presented clearly and is directly applicable to the problem.
Explanation: Detail the derivation or rationale behind each formula, explaining its relevance and necessity in the context of the problem-solving process. Use more relavent comprehensive supporting statements to reinforce the significance of these mathematical tools.
3: A Detailed Step-by-Step Solution:
Please provide a structured step-by-step solution to the given question, by incorporating any relevant data provided. This should include all necessary mathematical calculations presented in a logical and clear manner. The solution must be comprehensive, addressing all aspects of the question without omission.
Explanation: For each step in the solution, provide a thorough explanation of the calculations performed, including how each step contributes to solving the overall problem. Add more relevant comprehensive Supporting statements should enhance understanding and connect each calculation back to the core question.
Conclusion:
Conclude with a concise summary of the solution, succinctly presenting the final answer derived from the calculations.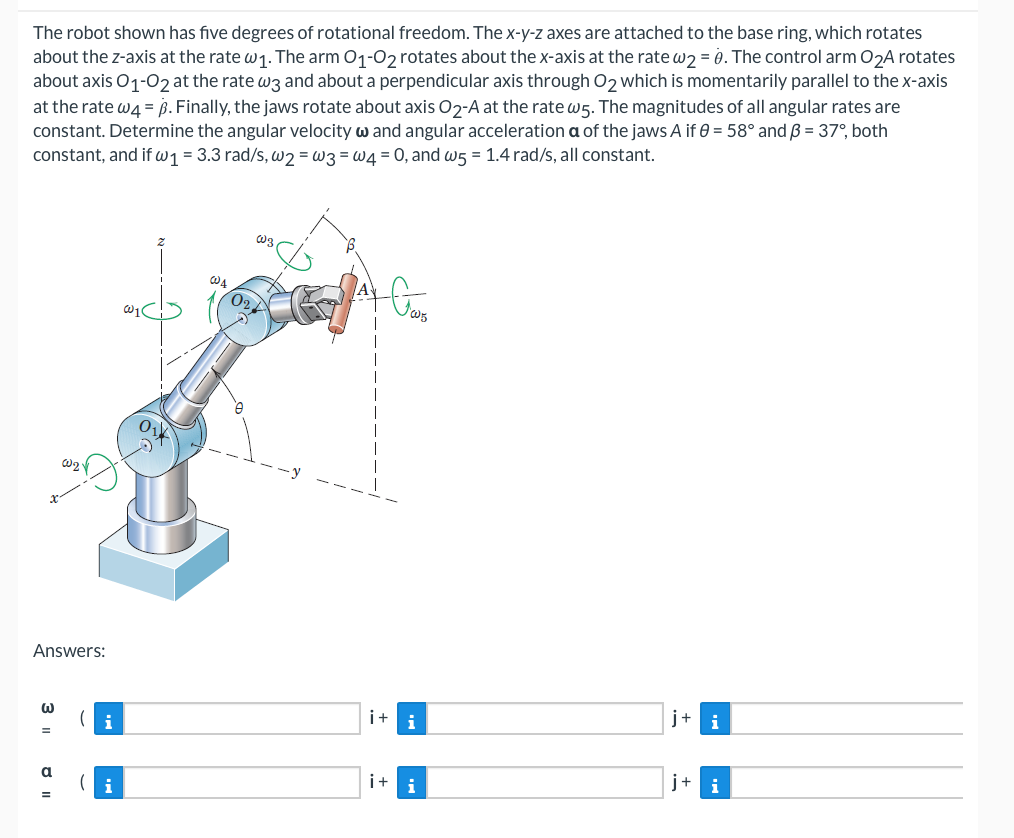 The robot shown has five degrees of rotational freedom. The x-y-z axes are attached to the base ring, which rotates
about the z-axis at the rate w1. The arm O1-O rotates about the x-axis at the rate w = 6. The control arm OA rotates
about axis 01-07 at the rate w3 and about a perpendicular axis through Op which is momentarily parallel to the x-axis
at the rate wy4 = p. Finally, the jaws rotate about axis O»-A at the rate ws. The magnitudes of all angular rates are
constant. Determine the angular velocity w and angular acceleration a of the jaws A if = 58° and 8 = 37°, both
constant, and if wq = 3.3 rad/s, wy = w3 = w4 = 0,and ws = 1.4 rad/s, all constant.
2 ag Ng
$
ls froC(Ea
acl (6 1 Va
yy d |
i |
| |
|
The robot shown has five degrees of rotational freedom. The x-y-z axes are attached to the base ring, which rotates
about the z-axis at the rate w1. The arm O1-O rotates about the x-axis at the rate w = 6. The control arm OA rotates
about axis 01-07 at the rate w3 and about a perpendicular axis through Op which is momentarily parallel to the x-axis
at the rate wy4 = p. Finally, the jaws rotate about axis O»-A at the rate ws. The magnitudes of all angular rates are
constant. Determine the angular velocity w and angular acceleration a of the jaws A if = 58° and 8 = 37°, both
constant, and if wq = 3.3 rad/s, wy = w3 = w4 = 0,and ws = 1.4 rad/s, all constant.
2 ag Ng
$
ls froC(Ea
acl (6 1 Va
yy d |
i |
| |
|
Asked by: shaik baji
Created at: 2025-10-09 21:25:43
Final Answer:
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :