Act like a helpful tutor and exlain me : Give step-by-step solution with explanation and final answer: For each the following assemblies, identify the number of links / bodies ( n ) , the total number of lower pairs, and the degrees of freedom ( f ) . explain in very detail
Question:
Act like a helpful tutor and exlain me :
Give step-by-step solution with explanation and final answer:
For each the following assemblies, identify the number of links
/
bodies
(
n
)
,
the total number of lower pairs, and the degrees of freedom
(
f
)
.
explain in very detail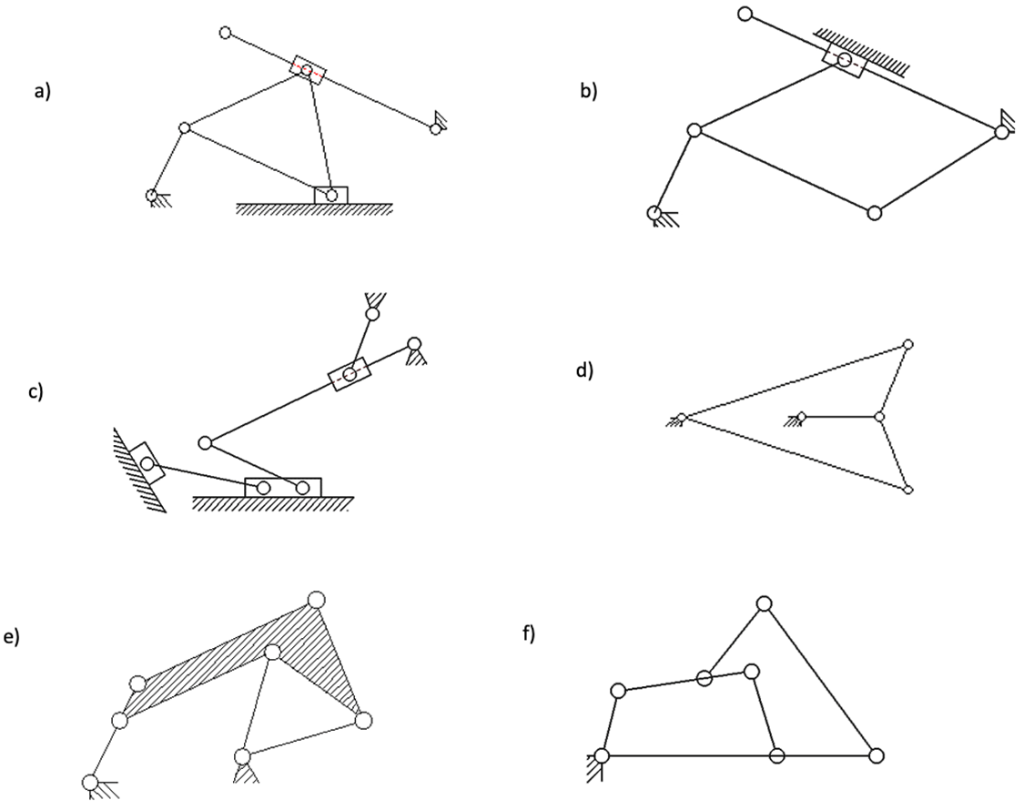
This is AI generated Response.
Asked by: manish kumar
Created at: 2025-09-25 09:05:57
Asked by: manish kumar
Created at: 2025-09-25 09:05:57
Final Answer:
Rendered
Raw Text
Did you like this answer?
To determine the degrees of freedom (\(f\)) of each mechanism, we'll use the Gruebler’s Equation for planar mechanisms:
\[
f = 3(n - 1) - 2j_1 - j_2
\]
Where:
- \(n\) is the number of links (including the ground).
- \(j_1\) is the number of lower pairs (1 degree of freedom each, like revolute or prismatic joints).
- \(j_2\) is the number of higher pairs (2 degrees of freedom each, like cam-follower pairs).
Let's analyze each assembly:
### a) Assembly
1. **Identify the Number of Links (\(n\)):**
- Count all the individual rigid bodies, including the ground.
- \(n = 5\)
2. **Identify Lower Pairs (\(j_1\)):**
- Count all revolute and prismatic joints.
- \(j_1 = 6\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(5 - 1) - 2(6) = 12 - 12 =
\]
### b) Assembly
1. **Identify the Number of Links (\(n\)):**
- \(n = 5\)
2. **Identify Lower Pairs (\(j_1\)):**
- \(j_1 = 6\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(5 - 1) - 2(6) = 12 - 12 =
\]
### c) Assembly
1. **Identify the Number of Links (\(n\)):**
- \(n = 5\)
2. **Identify Lower Pairs (\(j_1\)):**
- \(j_1 = 6\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(5 - 1) - 2(6) = 12 - 12 =
\]
### d) Assembly
1. **Identify the Number of Links (\(n\)):**
- \(n = 4\)
2. **Identify Lower Pairs (\(j_1\)):**
- \(j_1 = 4\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(4 - 1) - 2(4) = 9 - 8 = 1
\]
### e) Assembly
1. **Identify the Number of Links (\(n\)):**
- \(n = 6\)
2. **Identify Lower Pairs (\(j_1\)):**
- \(j_1 = 7\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(6 - 1) - 2(7) = 15 - 14 = 1
\]
### f) Assembly
1. **Identify the Number of Links (\(n\)):**
- \(n = 6\)
2. **Identify Lower Pairs (\(j_1\)):**
- \(j_1 = 7\)
3. **Calculate Degrees of Freedom (\(f\)):**
\[
f = 3(6 - 1) - 2(7) = 15 - 14 = 1
\]
### Summary
- **Assembly a:** \(n = 5\), \(j_1 = 6\), \(f = \)
- **Assembly b:** \(n = 5\), \(j_1 = 6\), \(f = \)
- **Assembly c:** \(n = 5\), \(j_1 = 6\), \(f = \)
- **Assembly d:** \(n = 4\), \(j_1 = 4\), \(f = 1\)
- **Assembly e:** \(n = 6\), \(j_1 = 7\), \(f = 1\)
- **Assembly f:** \(n = 6\), \(j_1 = 7\), \(f = 1\)
This analysis helps in understanding the mobility and constraints of each mechanical system.
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :