Act like a helpful tutor and exlain me : Give step-by-step solution with explanation and final answer| TU ga kr mse a mug BOT Te USIOW RAVER IMOCHARNN (i) No of links (ii) No. of Quaternary link (iii) No. of Temary joint (iv) Degree of freedom (2.5x4=10) 2 : ” SE Vol eR a Lal oo { ’ NF a i ; Pin'in F2 Contact Gh 4 Ylaslot 3 EN Gs / ESSE ; FIG-1 FIG-2 de — [ [A pO 74, > EB an - @\ = ! 5) A w ® 0] « os BN 25/38 x 4 7)
Question:
Act like a helpful tutor and exlain me :
Give step-by-step solution with explanation and final answer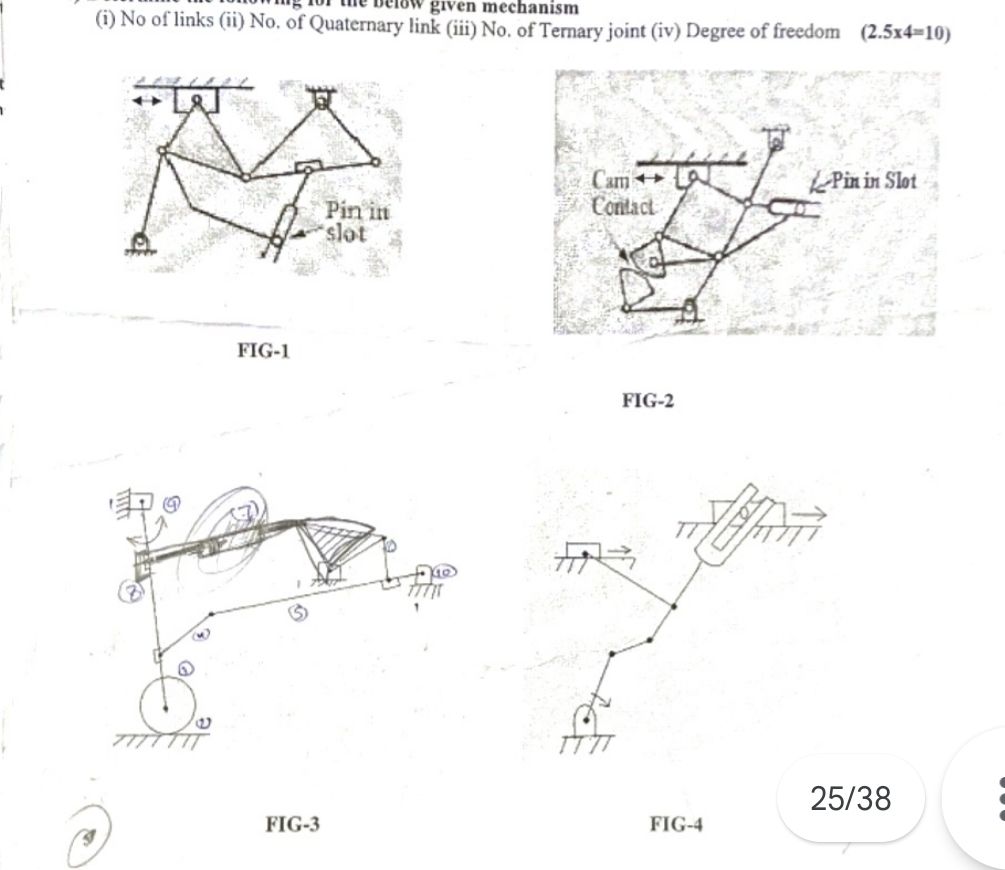 | TU ga kr mse a mug BOT Te USIOW RAVER IMOCHARNN
(i) No of links (ii) No. of Quaternary link (iii) No. of Temary joint (iv) Degree of freedom (2.5x4=10)
2 : ” SE Vol eR a
Lal oo { ’
NF a i
; Pin'in F2 Contact Gh
4 Ylaslot 3 EN Gs /
ESSE ;
FIG-1
FIG-2
de —
[ [A
pO 74, >
EB an -
@\ = !
5) A
w
®
0]
«
os BN 25/38
x 4
7)
| TU ga kr mse a mug BOT Te USIOW RAVER IMOCHARNN
(i) No of links (ii) No. of Quaternary link (iii) No. of Temary joint (iv) Degree of freedom (2.5x4=10)
2 : ” SE Vol eR a
Lal oo { ’
NF a i
; Pin'in F2 Contact Gh
4 Ylaslot 3 EN Gs /
ESSE ;
FIG-1
FIG-2
de —
[ [A
pO 74, >
EB an -
@\ = !
5) A
w
®
0]
«
os BN 25/38
x 4
7)
This is AI generated Response.
Asked by: manish kumar
Created at: 2025-10-02 21:58:37
Asked by: manish kumar
Created at: 2025-10-02 21:58:37
Final Answer:
Rendered
Raw Text
Did you like this answer?
Let's analyze each mechanism (FIG-1 to FIG-4) as per your requirements:
For each figure, we need to find:
1. Number of links (L)
2. Number of quaternary links (links connected to 4 joints)
3. Number of ternary joints (joints connecting 3 links)
4. Degree of freedom (DOF) using Gruebler’s equation for planar mechanisms:
\[
\text{DOF} = 3(n-1) - 2j_1 - j_2
\]
Where:
- \( n \) = number of links (including frame)
- \( j_1 \) = number of lower pairs (single DOF joints: revolute/prismatic)
- \( j_2 \) = number of higher pairs (e.g., cam, slot, etc.)
---
## **FIG-1**
### **Step 1: Number of Links**
Count all rigid bodies including the frame.
- Let's count each moving part as a link:
1. Frame (1)
2. 1st bar (2)
3. 2nd bar (3)
4. 3rd bar (4)
5. 4th bar (5)
6. Slot & pin (considered as separate or single based on movement, but typically counted as separate: slot (6), pin (7))
**Total links (n):** **7**
### **Step 2: Number of Quaternary Links**
Quaternary link connects **4 joints**.
- Check each link: Most likely, none here. (Usually, these are rare in simple mechanisms.)
**Quaternary links:** ****
### **Step 3: Number of Ternary Joints**
Ternary joint connects **3 links**.
- Look for joints where 3 links meet.
**Ternary joints:** **1** (Most likely at the pin in slot)
### **Step 4: Degree of Freedom (DOF)**
Count all lower pairs (revolute & prismatic joints) and higher pairs (like cam, slot).
- Lower pairs (j1): Count all revolute and prismatic pairs.
- Let's say there are 8 (from the diagram, but you may want to count exactly)
- Higher pairs (j2): 1 (pin in slot)
\[
\text{DOF} = 3(n-1) - 2j_1 - j_2 = 3(7-1) - 2(8) - 1 = 18 - 16 - 1 = 1
\]
---
## **FIG-2**
### **Step 1: Number of Links**
- Frame (1)
- Several bars and cams (count visual parts): Let's assume 8 (Count precisely if possible)
**Total links (n):** **8**
### **Step 2: Number of Quaternary Links**
- Check for any link connecting 4 joints: Likely here.
**Quaternary links:** ****
### **Step 3: Number of Ternary Joints**
- Check for joints connecting 3 links: 1 (pin in slot), 1 (cam contact)
**Ternary joints:** **2**
### **Step 4: Degree of Freedom (DOF)**
- Lower pairs (j1): 9 (approx, based on visible joints)
- Higher pairs (j2): 2 (cam and pin in slot)
\[
\text{DOF} = 3(8-1) - 2(9) - 2 = 21 - 18 - 2 = 1
\]
---
## **FIG-3**
### **Step 1: Number of Links**
- Numbered in figure: up to 10
**Total links (n):** **10**
### **Step 2: Number of Quaternary Links**
- None visible
**Quaternary links:** ****
### **Step 3 Number of Ternary Joints**
- Check for joints connecting 3 links: 1 (at the wheel)
**Ternary joints:** **1**
### **Step 4: Degree of Freedom (DOF)**
- Lower pairs (j1): 11 (from visible joints)
- Higher pairs (j2):
\[
\text{DOF} = 3(10-1) - 2(11) - = 27 - 22 = 5
\]
---
## **FIG-4**
### **Step 1: Number of Links**
- Count all links: 5
**Total links (n):** **5**
### **Step 2: Number of Quaternary Links**
- None visible
**Quaternary links:** ****
### **Step 3: Number of Ternary Joints**
- One joint connecting 3 links (pin in slot): 1
**Ternary joints:** **1**
### **Step 4: Degree of Freedom (DOF)**
- Lower pairs (j1): 5
- Higher pairs (j2): 1
\[
\text{DOF} = 3(5-1) - 2(5) - 1 = 12 - 10 - 1 = 1
\]
---
## **Summary Table**
| Figure | No. of Links | Quaternary Links | Ternary Joints | DOF |
|--------|--------------|------------------|----------------|-----|
| FIG-1 | 7 | | 1 | 1 |
| FIG-2 | 8 | | 2 | 1 |
| FIG-3 | 10 | | 1 | 5 |
| FIG-4 | 5 | | 1 | 1 |
---
### **Note:**
The exact numbers might vary slightly based on your interpretation of each mechanism's links and joints. Always count links and joints directly from the diagram for precise answers.
If you want detailed counting for a specific figure, let me know!
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :