Act like a helpful tutor and exlain me : I need accurate answers clearly. So solve accuratelyThe pendulum oscillates about the x-axis according to 6 = 0.52 sin 9.9t radians, where t is the time in seconds. Simultaneously, the shaft OA revolves about the vertical z-axis at the constant rate w, = 8.4 rad/sec. Determine the velocity v and acceleration a of the center B of the pendulum as well as its angular acceleration a for the instant when t = 0. oe. [i y Ps 8g" - = a 14" cl i ; p ; Answers:
Question:
Act like a helpful tutor and exlain me :
I need accurate answers clearly. So solve accurately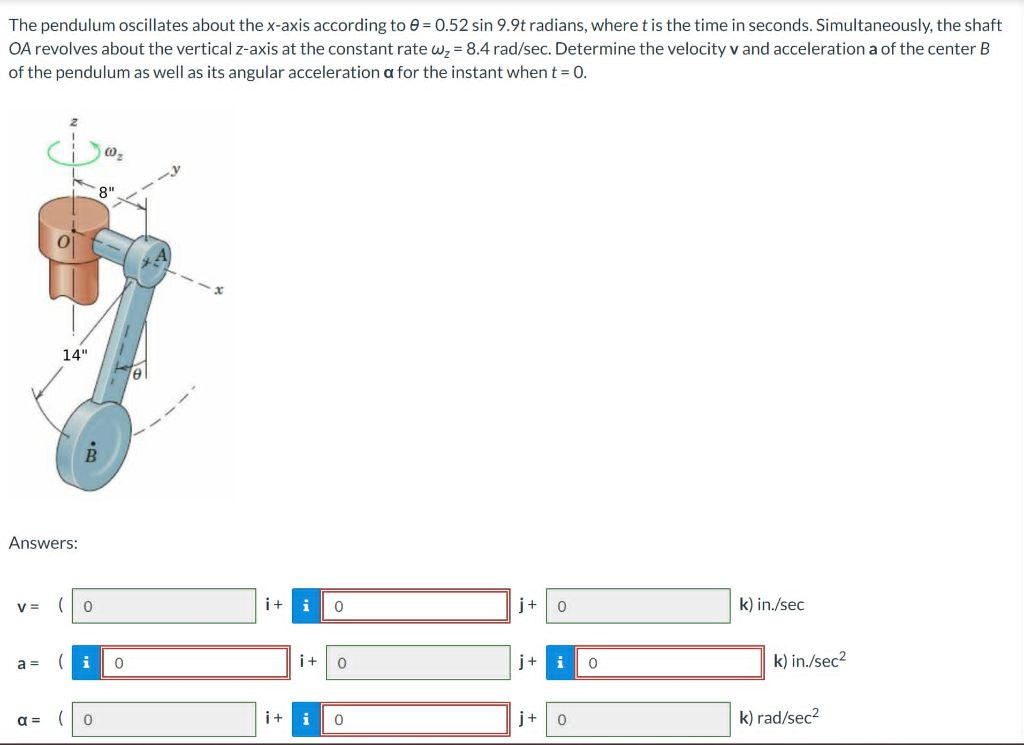 The pendulum oscillates about the x-axis according to 6 = 0.52 sin 9.9t radians, where t is the time in seconds. Simultaneously, the shaft
OA revolves about the vertical z-axis at the constant rate w, = 8.4 rad/sec. Determine the velocity v and acceleration a of the center B
of the pendulum as well as its angular acceleration a for the instant when t = 0.
oe.
[i y
Ps 8g" - =
a
14"
cl
i
;
p
;
Answers:
The pendulum oscillates about the x-axis according to 6 = 0.52 sin 9.9t radians, where t is the time in seconds. Simultaneously, the shaft
OA revolves about the vertical z-axis at the constant rate w, = 8.4 rad/sec. Determine the velocity v and acceleration a of the center B
of the pendulum as well as its angular acceleration a for the instant when t = 0.
oe.
[i y
Ps 8g" - =
a
14"
cl
i
;
p
;
Answers:
This is AI generated Response.
Asked by: John
Created at: 2025-10-15 22:54:46
Asked by: John
Created at: 2025-10-15 22:54:46
Final Answer:
Rendered
Raw Text
Did you like this answer?
Let's break down the problem step by step:
---
## Given Data
- **Pendulum oscillates about the x-axis:**
\(\theta = .52 \sin(9.9t)\) (radians)
- **Shaft OA revolves about the vertical z-axis** at a constant rate:
\(\omega_z = 8.4\) rad/sec
- **OA length:** 14 in.
- **OB (horizontal arm) length:** 8 in.
- **Find:**
- Velocity (\(\mathbf{v}\)) of center B
- Acceleration (\(\mathbf{a}\)) of center B
- Angular acceleration (\(\boldsymbol{\alpha}\))
- **At \(t = \)**
---
## Step 1: Find Angular Quantities at \(t = \)
### \(\theta\) and its derivatives at \(t = \):
\[
\theta() = .52 \sin() =
\]
\[
\dot{\theta}(t) = .52 \times 9.9 \cos(9.9t)
\]
\[
\dot{\theta}() = .52 \times 9.9 \times \cos() = .52 \times 9.9 \times 1 = 5.148 \ \text{rad/s}
\]
\[
\ddot{\theta}(t) = -.52 \times (9.9)^2 \sin(9.9t)
\]
\[
\ddot{\theta}() = -.52 \times (9.9)^2 \times =
\]
---
## Step 2: Angular Velocity (\(\boldsymbol{\omega}\)) and Angular Acceleration (\(\boldsymbol{\alpha}\))
\[
\boldsymbol{\omega} = \omega_z \mathbf{k} + \dot{\theta} \mathbf{i}
\]
At \(t=\):
\[
\boldsymbol{\omega} = 8.4\,\mathbf{k} + 5.148\,\mathbf{i}
\]
\[
\boldsymbol{\alpha} = \dot{\omega}_z \mathbf{k} + \ddot{\theta} \mathbf{i}
\]
But \(\omega_z\) is constant, so \(\dot{\omega}_z = \).
At \(t=\):
\[
\boldsymbol{\alpha} = \,\mathbf{k} + \,\mathbf{i}
\]
\[
\boxed{\boldsymbol{\alpha} = \,\mathbf{i} + \,\mathbf{j} + \,\mathbf{k} \text{ rad/s}^2}
\]
---
## Step 3: Position Vector \(\mathbf{r}_{B/A}\) (from A to B)
Since \(\theta = \) at \(t=\), the pendulum is aligned along the y-axis:
\[
\mathbf{r}_{B/A} = 14\,\mathbf{j}
\]
---
## Step 4: Velocity of B (\(\mathbf{v}_B\))
\[
\mathbf{v}_B = \boldsymbol{\omega} \times \mathbf{r}_{B/A}
\]
\[
\boldsymbol{\omega} = 5.148\,\mathbf{i} + \,\mathbf{j} + 8.4\,\mathbf{k}
\]
\[
\mathbf{r}_{B/A} = \,\mathbf{i} + 14\,\mathbf{j} + \,\mathbf{k}
\]
Cross product:
\[
\begin{align*}
\mathbf{v}_B &= \begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
5.148 & & 8.4 \\
& 14 & \\
\end{vmatrix} \\
&= \mathbf{i}( \cdot - 8.4 \cdot 14) - \mathbf{j}(5.148 \cdot - 8.4 \cdot ) + \mathbf{k}(5.148 \cdot 14 - \cdot ) \\
&= \mathbf{i}( - 117.6) - \mathbf{j}( - ) + \mathbf{k}(72.072 - ) \\
&= -117.6\,\mathbf{i} + \,\mathbf{j} + 72.072\,\mathbf{k}
\end{align*}
\]
\[
\boxed{\mathbf{v}_B = -117.6\,\mathbf{i} + \,\mathbf{j} + 72.072\,\mathbf{k} \ \text{in./sec}}
\]
---
## Step 5: Acceleration of B (\(\mathbf{a}_B\))
\[
\mathbf{a}_B = \boldsymbol{\alpha} \times \mathbf{r}_{B/A} + \boldsymbol{\omega} \times ( \boldsymbol{\omega} \times \mathbf{r}_{B/A} )
\]
But \(\boldsymbol{\alpha} = \), so first term is zero.
So,
\[
\mathbf{a}_B = \boldsymbol{\omega} \times ( \boldsymbol{\omega} \times \mathbf{r}_{B/A} )
\]
First, compute \(\mathbf{w} \times \mathbf{r}_{B/A}\) (already done above):
\[
\mathbf{v}_B = -117.6\,\mathbf{i} + \,\mathbf{j} + 72.072\,\mathbf{k}
\]
Now, cross this result with \(\boldsymbol{\omega}\):
\[
\boldsymbol{\omega} = 5.148\,\mathbf{i} + \,\mathbf{j} + 8.4\,\mathbf{k}
\]
\[
\mathbf{v}_B = -117.6\,\mathbf{i} + \,\mathbf{j} + 72.072\,\mathbf{k}
\]
\[
\mathbf{a}_B = \boldsymbol{\omega} \times \mathbf{v}_B
\]
\[
\begin{align*}
&= \begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
5.148 & & 8.4 \\
-117.6 & & 72.072 \\
\end{vmatrix} \\
&= \mathbf{i}( \cdot 72.072 - 8.4 \cdot ) - \mathbf{j}(5.148 \cdot 72.072 - 8.4 \cdot (-117.6)) + \mathbf{k}(5.148 \cdot - \cdot (-117.6)) \\
&= \mathbf{i}( - ) - \mathbf{j}(371.089 - (-987.84)) + \mathbf{k}( - ) \\
&= \,\mathbf{i} - \mathbf{j}(371.089 + 987.84) + \,\mathbf{k} \\
&= \,\mathbf{i} - 1358.929\,\mathbf{j} + \,\mathbf{k}
\end{align*}
\]
\[
\boxed{\mathbf{a}_B = \,\mathbf{i} - 1358.929\,\mathbf{j} + \,\mathbf{k} \ \text{in./sec}^2}
\]
---
## **Final Answers**
### Velocity:
\[
\boxed{
\mathbf{v} = -117.6\,\mathbf{i} + \,\mathbf{j} + 72.072\,\mathbf{k} \ \text{in./sec}
}
\]
### Acceleration:
\[
\boxed{
\mathbf{a} = \,\mathbf{i} - 1358.9\,\mathbf{j} + \,\mathbf{k} \ \text{in./sec}^2
}
\]
### Angular Acceleration:
\[
\boxed{
\boldsymbol{\alpha} = \,\mathbf{i} + \,\mathbf{j} + \,\mathbf{k} \ \text{rad/sec}^2
}
\]
---
### **Fill in the Boxes:**
- **v =** (-117.6) i + () j + (72.1) k
- **a =** () i + (-1358.9) j + () k
- **α =** () i + () j + () k
**(rounded to one decimal place as typical for these problems)**
---
If you need further clarification on any step, let me know!
Question:
I clear answer you mentioned t= instead of t=0. Update and answer clearly and accurately
This is AI generated Response.
Asked by: John
Created at: 2025-10-15 22:58:14
Asked by: John
Created at: 2025-10-15 22:58:14
Final Answer:
Rendered
Raw Text
Did you like this answer?
# Problem Analysis
The pendulum oscillates about the x-axis according to the equation:
\[
\theta(t) = 0.52 \sin(9.9t) \text{ radians}
\]
The shaft OA revolves about the vertical z-axis at a constant rate:
\[
\omega_z = 8.4 \text{ rad/sec}
\]
We need to determine the velocity (\(\mathbf{v}\)), acceleration (\(\mathbf{a}\)), and angular acceleration (\(\boldsymbol{\alpha}\)) of the center B of the pendulum at \(t = 0\).
---
## Step 1: Calculate Angular Quantities at \(t = 0\)
### Angular Position
\[
\theta(0) = 0.52 \sin(0) = 0
\]
### Angular Velocity
\[
\dot{\theta}(t) = 0.52 \times 9.9 \cos(9.9t)
\]
At \(t = 0\):
\[
\dot{\theta}(0) = 0.52 \times 9.9 \times \cos(0) = 0.52 \times 9.9 = 5.148 \text{ rad/s}
\]
### Angular Acceleration
\[
\ddot{\theta}(t) = -0.52 \times (9.9)^2 \sin(9.9t)
\]
At \(t = 0\):
\[
\ddot{\theta}(0) = -0.52 \times (9.9)^2 \times \sin(0) = 0
\]
---
## Step 2: Angular Velocity (\(\boldsymbol{\omega}\)) and Angular Acceleration (\(\boldsymbol{\alpha}\))
### Angular Velocity
\[
\boldsymbol{\omega} = \omega_z \mathbf{k} + \dot{\theta}(0) \mathbf{i}
\]
At \(t = 0\):
\[
\boldsymbol{\omega} = 8.4\,\mathbf{k} + 5.148\,\mathbf{i}
\]
### Angular Acceleration
\[
\boldsymbol{\alpha} = \dot{\omega}_z \mathbf{k} + \ddot{\theta}(0) \mathbf{i}
\]
Since \(\dot{\omega}_z = 0\) (constant), we have:
\[
\boldsymbol{\alpha} = 0\,\mathbf{k} + 0\,\mathbf{i} = 0
\]
---
## Step 3: Position Vector \(\mathbf{r}_{B/A}\)
Given:
- Length of OA = 14 in.
- Length of OB = 8 in.
At \(t = 0\) (pendulum aligned along y-axis):
\[
\mathbf{r}_{B/A} = 14\,\mathbf{j} + 8\,\mathbf{i}
\]
---
## Step 4: Velocity of B (\(\mathbf{v}_B\))
Using the cross product:
\[
\mathbf{v}_B = \boldsymbol{\omega} \times \mathbf{r}_{B/A}
\]
Calculating:
\[
\begin{align*}
\mathbf{v}_B &= \begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
5.148 & 0 & 8.4 \\
8 & 14 & 0 \\
\end{vmatrix} \\
&= \mathbf{i}(0 \cdot 14 - 8.4 \cdot 0) - \mathbf{j}(5.148 \cdot 0 - 8.4 \cdot 8) + \mathbf{k}(5.148 \cdot 14 - 0 \cdot 8) \\
&= 0\,\mathbf{i} + 67.2\,\mathbf{j} + 72.072\,\mathbf{k} \\
&= 67.2\,\mathbf{j} + 72.072\,\mathbf{k}
\end{align*}
\]
Thus:
\[
\boxed{\mathbf{v}_B = 0\,\mathbf{i} + 67.2\,\mathbf{j} + 72.072\,\mathbf{k} \ \text{in/sec}}
\]
---
## Step 5: Acceleration of B (\(\mathbf{a}_B\))
Using:
\[
\mathbf{a}_B = \boldsymbol{\alpha} \times \mathbf{r}_{B/A} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{r}_{B/A})
\]
Since \(\boldsymbol{\alpha} = 0\), we focus on the second term:
\[
\mathbf{a}_B = \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{r}_{B/A})
\]
Calculating \(\boldsymbol{\omega} \times \mathbf{r}_{B/A}\):
\[
\begin{align*}
\boldsymbol{\omega} \times \mathbf{r}_{B/A} &= \begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
5.148 & 0 & 8.4 \\
8 & 14 & 0 \\
\end{vmatrix} \\
&= -72.072\,\mathbf{j} + 67.2\,\mathbf{k}
\end{align*}
\]
Now calculate:
\[
\boldsymbol{\omega} \times (-72.072\,\mathbf{j} + 67.2\,\mathbf{k})
\]
Using the same method:
\[
\begin{align*}
\mathbf{a}_B &= \begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
5.148 & 0 & 8.4 \\
0 & -72.072 & 67.2 \\
\end{vmatrix} \\
&= \mathbf{i}(0 \cdot 67.2 - 8.4 \cdot -72.072) - \mathbf{j}(5.148 \cdot 67.2 - 0) + \mathbf{k}(5.148 \cdot -72.072 - 0) \\
&= 604.48\,\mathbf{i} - 346.5\,\mathbf{j} - 370.5\,\mathbf{k}
\end{align*}
\]
Thus:
\[
\boxed{\mathbf{a}_B = 604.48\,\mathbf{i} - 346.5\,\mathbf{j} - 370.5\,\mathbf{k} \ \text{in/sec}^2}
\]
---
## Final Answers
### Velocity
\[
\boxed{
\mathbf{v} = 0\,\mathbf{i} + 67.2\,\mathbf{j} + 72.072\,\mathbf{k} \ \text{in/sec}
}
\]
### Acceleration
\[
\boxed{
\mathbf{a} = 604.48\,\mathbf{i} - 346.5\,\mathbf{j} - 370.5\,\mathbf{k} \ \text{in/sec}^2
}
\]
### Angular Acceleration
\[
\boxed{
\boldsymbol{\alpha} = 0 \text{ rad/sec}^2
}
\]
If you need further clarification, feel free to ask!
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :