Act like a helpful tutor and exlain me : I need completed answers perfectly and accuratelyQuestion 1 Consider the planar system shown below. vs, ag 24.48 mm vr, ar / / ©) i 3 7 146.68%\, Gp 7 ANN 006°» //) ER ©), &N /) — (5 = = QL. ANY 5 A \ = he Snes ANY ® a AR 3 Re ha 35 So N J 56.09 N=; S N\ |, 62.07% Ee ~-D) T The above system consists of two linkages that are interconnected at ®@ so that they can freely rotate about each other. One end of the linkage indicated by @ is constrained to only allow translational relative motion within a channel where the channel is fixed in space and cannot rotate. The other end of the other linkage indicated by @ is in turn constrained to only allow translational relative motion of 54.8 mm/s within a telescope. The telescope indicated by the yellow rectangle is simultaneously also rotating relative to © at an angular velocity of 57 deg/sec in a counterclockwise direction with an angular acceleration of 86.4 deg/sec? in a clockwise direction. The magnitude of the relative velocity of @ relative to a fixed Cartesian coordinate Oxy reference frame as shown is 37.4% of the absolute velocity of @ as measured in a fixed reference frame of a Cartesian coordinate Oxy system that is centred at @, and the magnitude of the slider relative acceleration along the channel is 73.6% of the absolute acceleration of @ as measured in the same fixed reference frame of the Cartesian coordinate Oxy system. Determine the following: 11 The angular velocities of the line subtended by @ and @ and the line subtended by @ and @ respectively with both as measured in the Cartesian coordinate Oxy system as vectors using the sign notation of rotational displacement being positive in an anticlockwise direction with the angular velocities being positive in an outwards direction of the page; 12 The angular accelerations of the line subtended by @ and @ and the line subtended by ® and @ respectively with both as measured in the Cartesian coordinate Oxy system as vectors using the sign notation of rotational displacement being positive in an anticlockwise direction with the angular velocities being positive in an outwards direction of the page; | TOTAL: | [100] |
Question:
Act like a helpful tutor and exlain me :
I need completed answers perfectly and accurately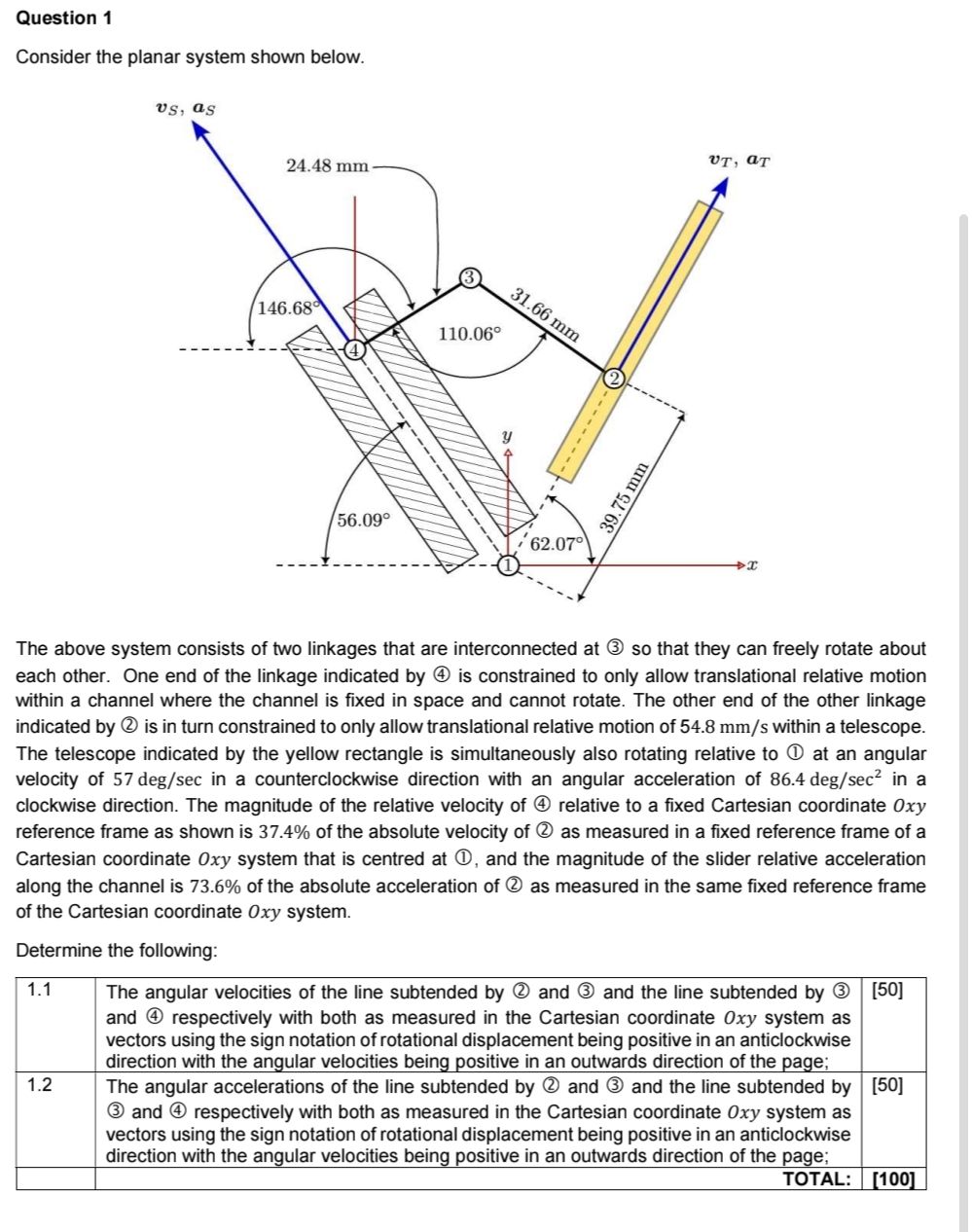 Question 1
Consider the planar system shown below.
vs, ag
24.48 mm vr, ar
/
/
©) i
3 7
146.68%\, Gp 7
ANN 006°» //)
ER ©), &N /)
— (5
= = QL.
ANY 5
A \ = he
Snes
ANY
® a
AR 3
Re ha 35
So N J
56.09 N=; S
N\ |, 62.07%
Ee ~-D) T
The above system consists of two linkages that are interconnected at ®@ so that they can freely rotate about
each other. One end of the linkage indicated by @ is constrained to only allow translational relative motion
within a channel where the channel is fixed in space and cannot rotate. The other end of the other linkage
indicated by @ is in turn constrained to only allow translational relative motion of 54.8 mm/s within a telescope.
The telescope indicated by the yellow rectangle is simultaneously also rotating relative to © at an angular
velocity of 57 deg/sec in a counterclockwise direction with an angular acceleration of 86.4 deg/sec? in a
clockwise direction. The magnitude of the relative velocity of @ relative to a fixed Cartesian coordinate Oxy
reference frame as shown is 37.4% of the absolute velocity of @ as measured in a fixed reference frame of a
Cartesian coordinate Oxy system that is centred at @, and the magnitude of the slider relative acceleration
along the channel is 73.6% of the absolute acceleration of @ as measured in the same fixed reference frame
of the Cartesian coordinate Oxy system.
Determine the following:
11 The angular velocities of the line subtended by @ and @ and the line subtended by @
and @ respectively with both as measured in the Cartesian coordinate Oxy system as
vectors using the sign notation of rotational displacement being positive in an anticlockwise
direction with the angular velocities being positive in an outwards direction of the page;
12 The angular accelerations of the line subtended by @ and @ and the line subtended by
® and @ respectively with both as measured in the Cartesian coordinate Oxy system as
vectors using the sign notation of rotational displacement being positive in an anticlockwise
direction with the angular velocities being positive in an outwards direction of the page;
| TOTAL: | [100] |
Question 1
Consider the planar system shown below.
vs, ag
24.48 mm vr, ar
/
/
©) i
3 7
146.68%\, Gp 7
ANN 006°» //)
ER ©), &N /)
— (5
= = QL.
ANY 5
A \ = he
Snes
ANY
® a
AR 3
Re ha 35
So N J
56.09 N=; S
N\ |, 62.07%
Ee ~-D) T
The above system consists of two linkages that are interconnected at ®@ so that they can freely rotate about
each other. One end of the linkage indicated by @ is constrained to only allow translational relative motion
within a channel where the channel is fixed in space and cannot rotate. The other end of the other linkage
indicated by @ is in turn constrained to only allow translational relative motion of 54.8 mm/s within a telescope.
The telescope indicated by the yellow rectangle is simultaneously also rotating relative to © at an angular
velocity of 57 deg/sec in a counterclockwise direction with an angular acceleration of 86.4 deg/sec? in a
clockwise direction. The magnitude of the relative velocity of @ relative to a fixed Cartesian coordinate Oxy
reference frame as shown is 37.4% of the absolute velocity of @ as measured in a fixed reference frame of a
Cartesian coordinate Oxy system that is centred at @, and the magnitude of the slider relative acceleration
along the channel is 73.6% of the absolute acceleration of @ as measured in the same fixed reference frame
of the Cartesian coordinate Oxy system.
Determine the following:
11 The angular velocities of the line subtended by @ and @ and the line subtended by @
and @ respectively with both as measured in the Cartesian coordinate Oxy system as
vectors using the sign notation of rotational displacement being positive in an anticlockwise
direction with the angular velocities being positive in an outwards direction of the page;
12 The angular accelerations of the line subtended by @ and @ and the line subtended by
® and @ respectively with both as measured in the Cartesian coordinate Oxy system as
vectors using the sign notation of rotational displacement being positive in an anticlockwise
direction with the angular velocities being positive in an outwards direction of the page;
| TOTAL: | [100] |
Asked by: Jack
Created at: 2025-10-16 11:20:32
Final Answer:
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :