Give step-by-step solution with explanation and final answer:Problem #1 For each of the planar linkages shown below, determine the number of links, the number of joints, and the mobility using Gruebler’s formular. Show your work step by step. \ . Yo Xi R To wh LEAN: i, hE \, @ ®) © ©
Question:
Give step-by-step solution with explanation and final answer: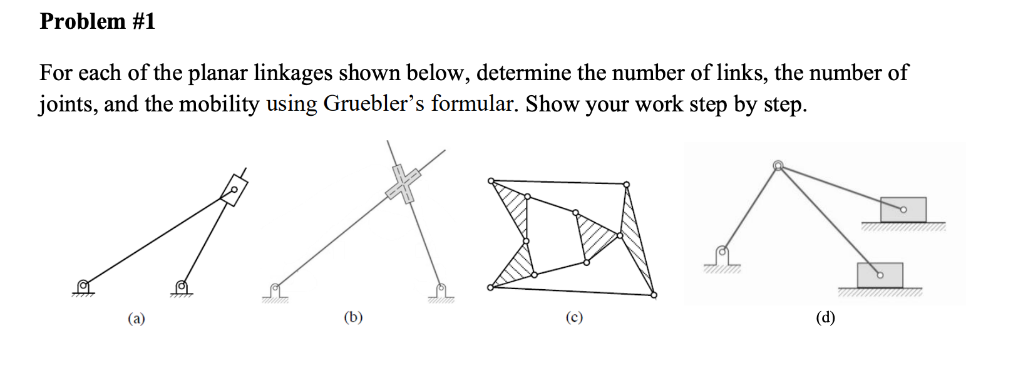 Problem #1
For each of the planar linkages shown below, determine the number of links, the number of
joints, and the mobility using Gruebler’s formular. Show your work step by step.
\ .
Yo Xi R
To wh
LEAN:
i, hE \,
@ ®) © ©
Problem #1
For each of the planar linkages shown below, determine the number of links, the number of
joints, and the mobility using Gruebler’s formular. Show your work step by step.
\ .
Yo Xi R
To wh
LEAN:
i, hE \,
@ ®) © ©
This is AI generated Response.
Asked by: Rahul
Created at: 2026-01-16 05:03:46
Asked by: Rahul
Created at: 2026-01-16 05:03:46
Final Answer:
Rendered
Raw Text
Did you like this answer?
Let's solve the problem step-by-step for each planar linkage using **Gruebler’s formula**.
---
## **Gruebler’s Formula (for planar mechanisms):**
\[
M = 3(n - 1) - 2j_1 - j_2
\]
Where:
- \( M \) = Mobility (degrees of freedom)
- \( n \) = Number of links (including frame)
- \( j_1 \) = Number of lower pairs (single DOF joints: revolute/prismatic)
- \( j_2 \) = Number of higher pairs (two DOF joints: cams, gears, etc.)
For most simple planar mechanisms, \( j_2 = \).
---
# (a) **First Linkage**
### **Step 1: Count number of links (\( n \))**
- 2 moving links + 1 fixed frame = **3 links**
### **Step 2: Count number of lower pairs (\( j_1 \))**
- 2 revolute joints (pins at ground) = **2**
- 1 revolute joint between the two links = **1**
- **Total \( j_1 = 3 \)**
### **Step 3: Plug into Gruebler’s Formula**
\[
M = 3(3-1) - 2 \times 3 = 6 - 6 =
\]
### **Final Answer (a):**
- Number of links: **3**
- Number of joints: **3**
- Mobility: **** (Structure, not a mechanism)
---
# (b) **Second Linkage (Slider-Crank)**
### **Step 1: Count number of links (\( n \))**
- 2 rods (crank and coupler) + 1 slider + 1 frame = **4 links**
### **Step 2: Count number of lower pairs (\( j_1 \))**
- 2 revolute joints (at ground and between links) = **2**
- 1 revolute joint (between coupler and slider) = **1**
- 1 prismatic joint (slider) = **1**
- **Total \( j_1 = 4 \)**
### **Step 3: Plug into Gruebler’s Formula**
\[
M = 3(4-1) - 2 \times 4 = 9 - 8 = 1
\]
### **Final Answer (b):**
- Number of links: **4**
- Number of joints: **4**
- Mobility: **1** (One input controls the mechanism)
---
# (c) **Third Linkage (Watt or Stephenson Six-Bar)**
### **Step 1: Count number of links (\( n \))**
- 6 moving links + 1 frame = **7 links**
### **Step 2: Count number of lower pairs (\( j_1 \))**
- Count the joints: Each dot is a revolute joint.
- There are **9** joints.
### **Step 3: Plug into Gruebler’s Formula**
\[
M = 3(7-1) - 2 \times 9 = 18 - 18 =
\]
### **Final Answer (c):**
- Number of links: **7**
- Number of joints: **9**
- Mobility: **** (It’s a structure—not a mechanism—unless one joint is ground and one is input)
---
# (d) **Fourth Linkage (Double Rocker with Sliders)**
### **Step 1: Count number of links (\( n \))**
- 2 rods + 2 sliders + 1 frame = **5 links**
### **Step 2: Count number of lower pairs (\( j_1 \))**
- 2 revolute joints at ground = **2**
- 2 prismatic joints (sliders) = **2**
- 2 revolute joints between rods and sliders = **2**
- **Total \( j_1 = 6 \)**
### **Step 3: Plug into Gruebler’s Formula**
\[
M = 3(5-1) - 2 \times 6 = 12 - 12 =
\]
### **Final Answer (d):**
- Number of links: **5**
- Number of joints: **6**
- Mobility: **** (Structure, not a mechanism)
---
## **Summary Table**
| Linkage | Links (\( n \)) | Joints (\( j_1 \)) | Mobility (\( M \)) |
|:-------:|:---------------:|:------------------:|:------------------:|
| (a) | 3 | 3 | |
| (b) | 4 | 4 | 1 |
| (c) | 7 | 9 | |
| (d) | 5 | 6 | |
---
**Let me know if you need explanations for each mechanism!**
📢 Instructions:
- Ask anything relatd to above question only.
- For new Question goto :