Give step-by-step solution with explanation and final answer:Problam:2: Assume ile DOF motion control system whose mathematical mode given a5.
8600) +90) 41 = KT
Friis system, the ore conta nd he nel con spc be gn 1 (0) = 2+ 823d
5 5, 1 To pte oh wid fore od spl, Furor, i 0 tht the
troche Stes compensa and he em ly grand othe ort
inl hs est.
1 the coionment 1 fis enorme fo which th cori fr con bo gm 35
RCO) = (1 snd th tr 5 pd 10 et Sree crit force
prod
Woke con th chin efor i
2) pene 5 Beil eqoen fo he are ten bt 1) hor ston rss
piscatponpmpsiormadiafofita ig
Pr at tea ERR Te —
pilronsbirieny
in th rr dries 2) we dr the xprsson oh dosed cles fo
eral £0)
11th rman has fore L. on)bor wch th otc fe co bo ph a F) =
Kan) 1 DA) md th ye + pened rch crn os bens F7(1) hrm
i Wnt nthe cking re for ts pte.
3) pons» ier waa oe the arr gen i ut 1) whos schon rss bn
Errata dog arm ay lve.
57 We de Sun for th Gantt ston gh I pr 2 ig 0
aah te dics 2, re eds cron Vrain of FV)
Question:
Give step-by-step solution with explanation and final answer:Problam:2: Assume ile DOF motion control system whose mathematical mode given a5.
8600) +90) 41 = KT
Friis system, the ore conta nd he nel con spc be gn 1 (0) = 2+ 823d
5 5, 1 To pte oh wid fore od spl, Furor, i 0 tht the
troche Stes compensa and he em ly grand othe ort
inl hs est.
1 the coionment 1 fis enorme fo which th cori fr con bo gm 35
RCO) = (1 snd th tr 5 pd 10 et Sree crit force
prod
Woke con th chin efor i
2) pene 5 Beil eqoen fo he are ten bt 1) hor ston rss
piscatponpmpsiormadiafofita ig
Pr at tea ERR Te —
pilronsbirieny
in th rr dries 2) we dr the xprsson oh dosed cles fo
eral £0)
11th rman has fore L. on)bor wch th otc fe co bo ph a F) =
Kan) 1 DA) md th ye + pened rch crn os bens F7(1) hrm
i Wnt nthe cking re for ts pte.
3) pons» ier waa oe the arr gen i ut 1) whos schon rss bn
Errata dog arm ay lve.
57 We de Sun for th Gantt ston gh I pr 2 ig 0
aah te dics 2, re eds cron Vrain of FV)
This is AI generated Response.
Asked by: gvr
Created at: 2025-06-17 16:03:02
Final Answer:
RenderedRaw Text
Did you like this answer?
Let's break down **Problem 2** step by step:
---
## **Given:**
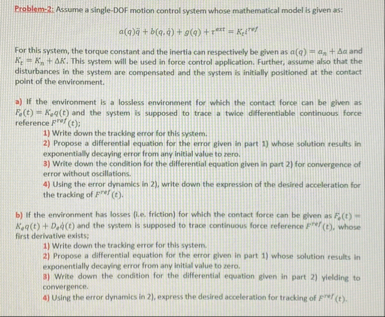
A single-DOF motion control system with the model:
\[
a(q) \ddot{q}(t) + b(q, \dot{q}) + g(q) + \tau_{ext} = k_c f_e^*(t)
\]
where:
- \( a(q) \): inertia (can be \( a_0 + \Delta a \))
- \( b(q, \dot{q}) \): damping/friction
- \( g(q) \): gravity
- \( \tau_{ext} \): external disturbance (compensated)
- \( k_c \): torque constant
- \( f_e^*(t) \): force at environment
Assume disturbance is compensated and initial system is at the contact point.
---
## **a) Lossless environment (contact force: \( f_e(q) = k_e(q - q_e^*) \))**
### **1) Write down the tracking error for this system.**
Let the desired force profile be \( f_e^*(t) \), and the corresponding desired position be \( q_e^*(t) \).
**Tracking error:**
\[
e(t) = q(t) - q_e^*(t)
\]
---
### **2) Propose a differential equation for the error whose solution decays to zero.**
From \( f_e(q) = k_e(q - q_e^*) \), we want \( f_e(q) \to f_e^*(t) \), so:
\[
k_e(q - q_e^*) = f_e^*(t) \implies q_e^*(t) = q - \frac{f_e^*(t)}{k_e}
\]
But for tracking, define \( e(t) = q(t) - q_e^*(t) \).
**System dynamics:**
\[
a(q) \ddot{q} + b(q, \dot{q}) + g(q) = k_c f_e^*(t)
\]
Assume compensation and at equilibrium, \( a(q) \ddot{q} = 0 \), \( b(q, \dot{q}) = 0 \), \( g(q) = 0 \):
\[
0 = k_c f_e^*(t)
\]
For control, let's linearize and use PD control:
\[
a_0 \ddot{q} + k_e(q - q_e^*) = f_e^*(t)
\]
So,
\[
a_0 \ddot{q} + k_e e(t) = f_e^*(t)
\]
Let \( f_e^*(t) \) be the reference; set \( a_0 \ddot{e}(t) + k_e e(t) = 0 \):
\[
\ddot{e}(t) + \frac{k_e}{a_0} e(t) = 0
\]
---
### **3) Condition for convergence without oscillations:**
The characteristic equation is:
\[
s^2 + \frac{k_e}{a_0} = 0
\implies s = \pm j\sqrt{\frac{k_e}{a_0}}
\]
This is purely imaginary (undamped), so the system will oscillate unless damping is added.
To avoid oscillation (i.e. critically damped or overdamped), add a damping term \( b \dot{e}(t) \):
\[
a_0 \ddot{e}(t) + b \dot{e}(t) + k_e e(t) = 0
\]
Characteristic equation:
\[
s^2 + \frac{b}{a_0}s + \frac{k_e}{a_0} = 0
\]
For non-oscillatory convergence:
\[
\left(\frac{b}{a_0}\right)^2 > 4\frac{k_e}{a_0} \implies b^2 > 4k_e a_0
\]
---
### **4) Desired acceleration expression for tracking \( f_e^*(t) \):**
From earlier:
\[
a_0 \ddot{q}(t) + k_e (q(t) - q_e^*(t)) = f_e^*(t)
\]
We want \( q(t) \) to track \( q_e^*(t) \) so set:
\[
a_0 \ddot{q}(t) = f_e^*(t) - k_e (q(t) - q_e^*(t))
\]
Or,
\[
\ddot{q}(t) = \frac{1}{a_0} \left[ f_e^*(t) - k_e (q(t) - q_e^*(t)) \right]
\]
---
## **b) If the environment has losses (i.e., friction: \( f_e(q, \dot{q}) = k_e(q - q_e^*) + b_e \dot{q} \)):**
### **1) Write down the tracking error:**
Same as before:
\[
e(t) = q(t) - q_e^*(t)
\]
---
### **2) Propose a differential equation for the error:**
System equation:
\[
a_0 \ddot{q} + b_e \dot{q} + k_e(q - q_e^*) = f_e^*(t)
\]
Tracking error:
\[
a_0 \ddot{e}(t) + b_e \dot{e}(t) + k_e e(t) = 0
\]
---
### **3) Condition for fast, non-oscillatory convergence:**
Characteristic equation:
\[
s^2 + \frac{b_e}{a_0} s + \frac{k_e}{a_0} = 0
\]
For critically damped or overdamped (no oscillations):
\[
\left(\frac{b_e}{a_0}\right)^2 \geq 4\frac{k_e}{a_0}
\implies b_e^2 \geq 4 k_e a_0
\]
---
### **4) Desired acceleration for tracking \( f_e^*(t) \):**
From above:
\[
a_0 \ddot{q}(t) + b_e \dot{q}(t) + k_e (q(t) - q_e^*(t)) = f_e^*(t)
\]
So,
\[
\ddot{q}(t) = \frac{1}{a_0} \left[ f_e^*(t) - b_e \dot{q}(t) - k_e (q(t) - q_e^*(t)) \right]
\]
---
## **Summary Table**
| Part | Tracking Error | Error Dynamics | Non-oscillation Condition | Desired Acceleration |
|------|---------------|---------------|--------------------------|---------------------|
| a) | \( q - q_e^* \) | \( \ddot{e} + \frac{k_e}{a_0}e = 0 \) | Add damping: \( b^2 > 4k_e a_0 \) | \( \ddot{q} = \frac{1}{a_0} [f_e^* - k_e (q-q_e^*)] \) |
| b) | \( q - q_e^* \) | \( \ddot{e} + \frac{b_e}{a_0}\dot{e} + \frac{k_e}{a_0}e = 0 \) | \( b_e^2 \geq 4k_e a_0 \) | \( \ddot{q} = \frac{1}{a_0} [f_e^* - b_e \dot{q} - k_e(q-q_e^*)] \) |
---
If you need the derivation for any step or a more detailed explanation, **let me know**!
Question:
i need only final Answers of both parts
This is AI generated Response.
Asked by: gvr
Created at: 2025-06-17 16:25:59
VIPSolutions focuses on clear, step‑by‑step explanations so you can learn quickly. Whether you need an AI‑generated walkthrough or a short hint to get unstuck, each solution is organized for fast reading and easy review later.
Search similar questions, compare approaches, and bookmark the best answers for revision. Our goal is simple: quick, reliable study help that feels natural—not noisy.
 Problam:2: Assume ile DOF motion control system whose mathematical mode given a5.
8600) +90) 41 = KT
Friis system, the ore conta nd he nel con spc be gn 1 (0) = 2+ 823d
5 5, 1 To pte oh wid fore od spl, Furor, i 0 tht the
troche Stes compensa and he em ly grand othe ort
inl hs est.
1 the coionment 1 fis enorme fo which th cori fr con bo gm 35
RCO) = (1 snd th tr 5 pd 10 et Sree crit force
prod
Woke con th chin efor i
2) pene 5 Beil eqoen fo he are ten bt 1) hor ston rss
piscatponpmpsiormadiafofita ig
Pr at tea ERR Te —
pilronsbirieny
in th rr dries 2) we dr the xprsson oh dosed cles fo
eral £0)
11th rman has fore L. on)bor wch th otc fe co bo ph a F) =
Kan) 1 DA) md th ye + pened rch crn os bens F7(1) hrm
i Wnt nthe cking re for ts pte.
3) pons» ier waa oe the arr gen i ut 1) whos schon rss bn
Errata dog arm ay lve.
57 We de Sun for th Gantt ston gh I pr 2 ig 0
aah te dics 2, re eds cron Vrain of FV)
Problam:2: Assume ile DOF motion control system whose mathematical mode given a5.
8600) +90) 41 = KT
Friis system, the ore conta nd he nel con spc be gn 1 (0) = 2+ 823d
5 5, 1 To pte oh wid fore od spl, Furor, i 0 tht the
troche Stes compensa and he em ly grand othe ort
inl hs est.
1 the coionment 1 fis enorme fo which th cori fr con bo gm 35
RCO) = (1 snd th tr 5 pd 10 et Sree crit force
prod
Woke con th chin efor i
2) pene 5 Beil eqoen fo he are ten bt 1) hor ston rss
piscatponpmpsiormadiafofita ig
Pr at tea ERR Te —
pilronsbirieny
in th rr dries 2) we dr the xprsson oh dosed cles fo
eral £0)
11th rman has fore L. on)bor wch th otc fe co bo ph a F) =
Kan) 1 DA) md th ye + pened rch crn os bens F7(1) hrm
i Wnt nthe cking re for ts pte.
3) pons» ier waa oe the arr gen i ut 1) whos schon rss bn
Errata dog arm ay lve.
57 We de Sun for th Gantt ston gh I pr 2 ig 0
aah te dics 2, re eds cron Vrain of FV)