Act like a helpful tutor and exlain me :
I need it in the same languageN1
Ta
Tb
[] k k 1
Ii
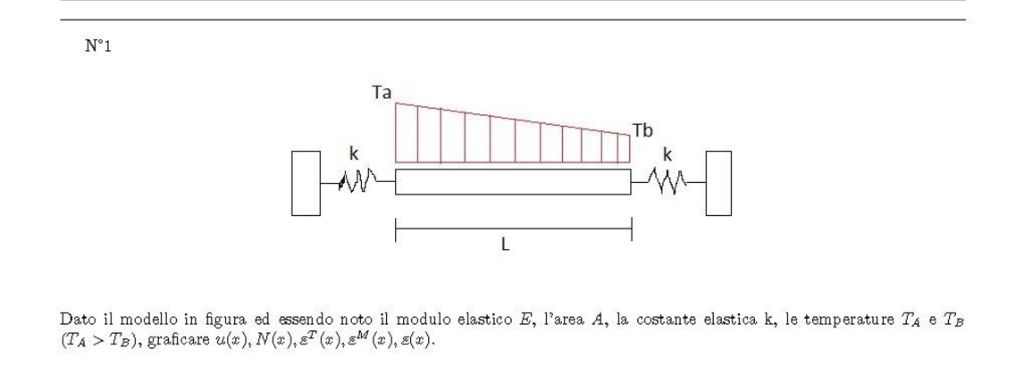
Dato il modelo in figura ed essendo neto il modulo elastico E, I'area A, la costants elastics k, le temperature T4 ¢ Tp
(Ta > Ts), graficate u(x), N(z),&7 (2), 2M (=z), &(z).
Question:
Act like a helpful tutor and exlain me :
I need it in the same languageN1
Ta
Tb
[] k k 1
Ii
Dato il modelo in figura ed essendo neto il modulo elastico E, I'area A, la costants elastics k, le temperature T4 ¢ Tp
(Ta > Ts), graficate u(x), N(z),&7 (2), 2M (=z), &(z).
This is AI generated Response.
Asked by: Jack
Created at: 2025-10-16 21:56:55
Final Answer:
RenderedRaw Text
Did you like this answer?
# Spiegazione dell’Esercizio
## Descrizione del Modello
Hai una barra vincolata da due molle elastiche (costante elastica `k`), sottoposta a un gradiente termico (temperatura `T_A` a sinistra, `T_B` a destra, con `T_A > T_B`). La barra ha lunghezza `L`, sezione `A`, modulo di Young `E`.
## Cosa ti viene chiesto
1.Grafica:**
- Spostamento \( u \)
- Sforzo normale \( N(x) \)
- Deformazione totale \( \varepsilon^T(x) \)
- Deformazione meccanica \( \varepsilon^M(x) \)
- Deformazione termica \( \varepsilon^\theta(x) \)
---
## Spiegazione Passo Passo
### 1. **Distribuzione della Temperatura**
La temperatura varia linearmente da \( T_A \) a \( T_B \) lungo la barra:
\[
T(x) = T_A - \frac{T_A - T_B}{L}x
\]
### 2. **Deformazione Termica**
La deformazione termica è:
\[
\varepsilon^\theta(x) = \alpha [T(x) - T_]
\]
dove \(\alpha\) è il coefficiente di dilatazione termica.
### 3. **Deformazione Totale**
La deformazione totale in ogni sezione è data da:
\[
\varepsilon^T(x) = \frac{du}{dx}
\]
dove \(u(x)\) è lo spostamento.
### 4. **Deformazione Meccanica**
\[
\varepsilon^M(x) = \varepsilon^T(x) - \varepsilon^\theta(x)
\]
### 5. **Sforzo Normale**
\[
\sigma(x) = E \cdot \varepsilon^M(x)
\]
\[
N(x) = \sigma(x) \cdot A
\]
### 6. **Condizioni al Contorno**
Le molle ai lati esercitano una forza proporzionale allo spostamento delle estremità:
\[
N() = -k \cdot u() \\
N(L) = k \cdot u(L)
\]
---
## Schema dei Grafici
- \( u(x) \): **Cresce** (o decresce) lungo la barra, dipende dal gradiente termico e dai vincoli delle molle.
- \( N(x) \): **Costante** lungo la barra (assenza di carichi distribuiti).
- \( \varepsilon^\theta(x) \): **Lineare** da \( T_A \) a \( T_B \).
- \( \varepsilon^T(x) \): Ricava da \( u(x) \), variazione globale.
- \( \varepsilon^M(x) \): Dalla differenza tra totale e termica.
---
## In Sintesi
Per risolvere:
1. Ricava \( T(x) \) e quindi \( \varepsilon^\theta(x) \).
2. Imposta l’equilibrio: la forza nelle molle è uguale e opposta allo sforzo nella barra.
3. Usa le condizioni al contorno per trovare \( u() \) e \( u(L) \).
4. Calcola tutte le deformazioni e lo sforzo normale.
5. **Grafica** le funzioni richieste.
Se vuoi, posso aiutarti a scrivere le equazioni esplicite di ogni funzione! Vuoi vedere i calcoli dettagliati?
Question:
Perfetto — ecco la soluzione **in italiano**, adattata al testo del problema e alle notazioni originali.
# Dati e descrizione
Barra di lunghezza (L) collegata a due molle di rigidezza (k) alle estremità. La temperatura varia linearmente da (T_A) (a sinistra) a (T_B) (a destra) con (T_A>T_B). Sono noti: modulo elastico (E), area (A), costante di dilatazione termica (\alpha), rigidezza delle molle (k).
Vogliamo le seguenti grandezze lungo la barra: spostamento assiale (u(x)), forza assiale (N(x)), deformazione termica (\varepsilon^{T}(x)), deformazione meccanica (\varepsilon^{M}(x)) e deformazione totale (\varepsilon(x)).
---
## 1) Distribuzione di temperatura
Assumendo variazione lineare:
[
T(x)=T_A + \frac{T_B-T_A}{L},x \qquad (0\le x\le L)
]
Definiamo una temperatura di riferimento (T_0) (se non specificata si può usare (T_0=0) o la temperatura iniziale di riferimento); la variazione locale è (\Delta T(x)=T(x)-T_0).
---
## 2) Deformazione termica
La deformazione dovuta alla temperatura in ogni punto è:
[
\varepsilon^{T}(x)=\alpha,\Delta T(x)=\alpha\Big[T_A + \frac{T_B-T_A}{L}x - T_0\Big].
]
---
## 3) Relazione costitutiva e forza assiale
Tensione elastica: (\sigma(x)=E\big(\varepsilon(x)-\varepsilon^{T}(x)\big)).
Forza assiale (per area costante):
[
N(x)=\sigma(x),A = E A\big(\varepsilon(x)-\varepsilon^{T}(x)\big).
]
Equilibrio senza carico distribuito lungo la barra impone
[
\frac{dN}{dx}=0 \quad\Rightarrow\quad N(x)=N=\text{costante}.
]
Quindi la componente meccanica della deformazione è uniforme:
[
\varepsilon^{M}=\frac{N}{E A}.
]
---
## 4) Legame (\varepsilon)–(u) e integrazione
Per definizione:
[
\varepsilon(x)=\frac{du}{dx}=\varepsilon^{M}+\varepsilon^{T}(x)=\frac{N}{E A}+\alpha\Big[T_A + \frac{T_B-T_A}{L}x - T_0\Big].
]
Integrando da (0) a (x):
[
u(x)=\frac{N}{E A},x + \alpha\Big[(T_A-T_0),x + \frac{T_B-T_A}{2L},x^{2}\Big] + C,
]
dove (C) è una costante di integrazione uguale a (u(0)).
---
## 5) Condizioni ai bordi (molle)
Le molle collegano lo spostamento delle estremità alla forza N:
* In (x=0): la molla sinistra esercita forza (+k,u(0)) verso destra, quindi
[
N = k,u(0) = k,C.
]
* In (x=L): la molla destra esercita forza (-k,u(L)) (opposta all'allungamento), quindi
[
-N = k,u(L).
]
Sostituendo (u(L)) dall'espressione integrata:
[
u(L)=\frac{N}{E A}L + \alpha\Big[(T_A-T_0)L + \frac{T_B-T_A}{2}L\Big] + C.
]
Usando (C=\dfrac{N}{k}) nella condizione di destra:
[
-,N = k\Big(\frac{N}{E A}L + \alpha\big[(T_A-T_0)L + \tfrac{T_B-T_A}{2}L\big] + \frac{N}{k}\Big).
]
Svolgendo i passaggi e riordinando otteniamo l'espressione per (N):
[
\Big(2 + \frac{kL}{E A}\Big)N = -,k,\alpha,L\Big[(T_A-T_0) + \frac{T_B-T_A}{2}\Big].
]
Quindi
[
\boxed{,N = -,\dfrac{k,\alpha,L\Big[(T_A-T_0) + \dfrac{T_B-T_A}{2}\Big]}{,2 + \dfrac{kL}{E A},},}
]
Il segno negativo indica che la forza assiale è di compressione (ci si aspetta compressione perché (T_A>T_B) dà espansione termica senza libertà completa che viene contrastata dalle molle).
---
## 6) Espressioni finali delle grandezze richieste
* Forza assiale (costante):
[
N(x)=N\quad\text{con }N \text{ dato dalla formula sopra.}
]
* Deformazione meccanica (costante):
[
\varepsilon^{M}(x)=\varepsilon^{M}=\frac{N}{E A}.
]
* Deformazione termica (lineare):
[
\varepsilon^{T}(x)=\alpha\Big[T_A + \frac{T_B-T_A}{L}x - T_0\Big].
]
* Deformazione totale:
[
\varepsilon(x)=\varepsilon^{M}+\varepsilon^{T}(x)=\frac{N}{E A}+\alpha\Big[T_A + \frac{T_B-T_A}{L}x - T_0\Big].
]
* Spostamento:
[
u(x)=\frac{N}{E A},x + \alpha\Big[(T_A-T_0),x + \frac{T_B-T_A}{2L},x^{2}\Big] + \frac{N}{k}.
]
(ricordando (C=u(0)=N/k)).
---
## 7) Andamento qualitativo (grafici)
* (u(x)): funzione contenente un termine in (x^2) ⇒ **andamento parabolico**; la curvatura proviene dalla componente termica quadratica.
* (N(x)): **costante** lungo la barra.
* (\varepsilon^{M}(x)): **costante** (uguale a (N/(EA))).
* (\varepsilon^{T}(x)): **lineare** da (\alpha(T_A-T_0)) a (\alpha(T_B-T_0)).
* (\varepsilon(x)): somma di una costante e di una funzione lineare ⇒ **lineare** in (x).
---
This is AI generated Response.
Asked by: Jack
Created at: 2025-10-16 21:58:17
Final Answer:
RenderedRaw Text
Did you like this answer?
# Spiegazione dell’Esercizio
## Descrizione del Modello
Hai una barra vincolata da due molle elastiche (costante elastica `k`), sottoposta a un gradiente termico (temperatura `T_A` a sinistra, `T_B` a destra, con `T_A > T_B`). La barra ha lunghezza `L`, sezione `A`, modulo di Young `E`.
## Cosa ti viene chiesto
1. Grafica:
- Spostamento \( u(x) \)
- Sforzo normale \( N(x) \)
- Deformazione totale \( \varepsilon^T(x) \)
- Deformazione meccanica \( \varepsilon^M(x) \)
- Deformazione termica \( \varepsilon^\theta(x) \)
---
## Spiegazione Passo Passo
### 1. Distribuzione della Temperatura
La temperatura varia linearmente da \( T_A \) a \( T_B \) lungo la barra:
\[
T(x) = T_A - \frac{T_A - T_B}{L}x
\]
### 2. Deformazione Termica
La deformazione termica è:
\[
\varepsilon^\theta(x) = \alpha [T(x) - T_0]
\]
dove \(\alpha\) è il coefficiente di dilatazione termica e \( T_0 \) è una temperatura di riferimento.
### 3. Deformazione Totale
La deformazione totale in ogni sezione è data da:
\[
\varepsilon^T(x) = \frac{du}{dx}
\]
dove \(u(x)\) è lo spostamento.
### 4. Deformazione Meccanica
\[
\varepsilon^M(x) = \varepsilon^T(x) - \varepsilon^\theta(x)
\]
### 5. Sforzo Normale
\[
\sigma(x) = E \cdot \varepsilon^M(x)
\]
\[
N(x) = \sigma(x) \cdot A
\]
### 6. Condizioni al Contorno
Le molle ai lati esercitano una forza proporzionale allo spostamento delle estremità:
\[
N(0) = -k \cdot u(0) \\
N(L) = k \cdot u(L)
\]
---
## Schema dei Grafici
- \( u(x) \): **Cresce** o decresce lungo la barra, in base al gradiente termico e ai vincoli delle molle.
- \( N(x) \): **Costante** lungo la barra (assenza di carichi distribuiti).
- \( \varepsilon^\theta(x) \): **Lineare** da \( T_A \) a \( T_B \).
- \( \varepsilon^T(x) \): Ricavata da \( u(x) \), variazione globale.
- \( \varepsilon^M(x) \): Dalla differenza tra totale e termica.
---
## In Sintesi
Per risolvere:
1. Ricava \( T(x) \) e quindi \( \varepsilon^\theta(x) \).
2. Imposta l’equilibrio: la forza nelle molle è uguale e opposta allo sforzo nella barra.
3. Usa le condizioni al contorno per trovare \( u(0) \) e \( u(L) \).
4. Calcola tutte le deformazioni e lo sforzo normale.
5. **Grafica** le funzioni richieste.
Se hai bisogno di calcoli specifici o ulteriori dettagli, chiedi pure!
Question:
Generate graphs
This is AI generated Response.
Asked by: Jack
Created at: 2025-10-16 22:05:46
Final Answer:
RenderedRaw Text
Did you like this answer?
# Grafici delle Funzioni
## 1. Grafico dello Spostamento \( u(x) \)
### Descrizione
- **Forma**: Quadratica, derivante dalla dilatazione termica e dalla deformazione meccanica.
- **Comportamento**: Cresce (o decresce) in base ai valori di \( T_A \) e \( T_B \).
### Equazione
\[
u(x) = \frac{N}{EA} x + \alpha \left[ \left( T_A - T_0 \right) x + \frac{T_B - T_A}{2L} x^2 \right] + C
\]
## 2. Grafico della Forza Normale \( N(x) \)
### Descrizione
- **Forma**: Costante lungo la barra.
- **Comportamento**: La forza è uniforme in assenza di carichi distribuiti.
### Equazione
\[
N(x) = N \quad \text{(costante)}
\]
## 3. Grafico della Deformazione Meccanica \( \varepsilon^M(x) \)
### Descrizione
- **Forma**: Costante.
- **Comportamento**: Indica la deformazione meccanica uniforme lungo la barra.
### Equazione
\[
\varepsilon^M(x) = \frac{N}{EA}
\]
## 4. Grafico della Deformazione Termica \( \varepsilon^\theta(x) \)
### Descrizione
- **Forma**: Lineare.
- **Comportamento**: Varia a causa del cambiamento di temperatura lungo la barra.
### Equazione
\[
\varepsilon^\theta(x) = \alpha \left[ T_A + \frac{T_B - T_A}{L} x - T_0 \right]
\]
## 5. Grafico della Deformazione Totale \( \varepsilon(x) \)
### Descrizione
- **Forma**: Lineare.
- **Comportamento**: Somma della deformazione meccanica e della deformazione termica.
### Equazione
\[
\varepsilon(x) = \varepsilon^M + \varepsilon^\theta(x) = \frac{N}{EA} + \alpha \left[ T_A + \frac{T_B - T_A}{L} x - T_0 \right]
\]
---
## Conclusione
Questi grafici rappresentano le grandezze fondamentali per il modello della barra soggetta a un gradiente termico e vincolata da molle. Se hai bisogno di ulteriori dettagli o di assistenza nel disegno dei grafici, fammelo sapere!
VIPSolutions focuses on clear, step‑by‑step explanations so you can learn quickly. Whether you need an AI‑generated walkthrough or a short hint to get unstuck, each solution is organized for fast reading and easy review later.
Search similar questions, compare approaches, and bookmark the best answers for revision. Our goal is simple: quick, reliable study help that feels natural—not noisy.
 N1
Ta
Tb
[] k k 1
Ii
Dato il modelo in figura ed essendo neto il modulo elastico E, I'area A, la costants elastics k, le temperature T4 ¢ Tp
(Ta > Ts), graficate u(x), N(z),&7 (2), 2M (=z), &(z).
N1
Ta
Tb
[] k k 1
Ii
Dato il modelo in figura ed essendo neto il modulo elastico E, I'area A, la costants elastics k, le temperature T4 ¢ Tp
(Ta > Ts), graficate u(x), N(z),&7 (2), 2M (=z), &(z).